


طراحی و ساخت بازوی توانبخشی
اطلاعات بیشتر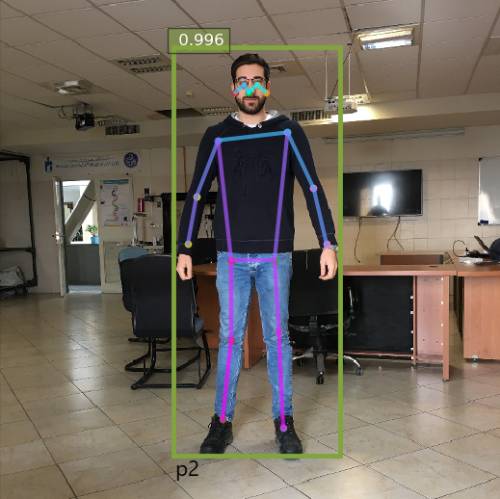
توسعه الگوریتم تشخیص هویت از روی ابعاد بدنی
اطلاعات بیشتر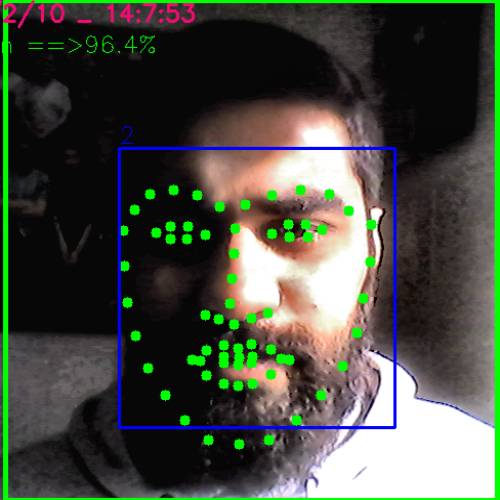
بازشناسی چهره انسان بر مبنای شاخصهای هندسی مبتنی بر شبکههای عصبی عمیق
اطلاعات بیشتر
توسعه الگوریتم تشخیص شستشوی صحیح دست
اطلاعات بیشتر
تشخیص هویت مبتنی بر صدای انسان با استفاده از شبکههای عصبی عمیق و براساس شاخصهای هندسی
اطلاعات بیشتر
جهتیابی خودکار رباتهای پرنده به کمک روشهای یادگیری عمیق
اطلاعات بیشتر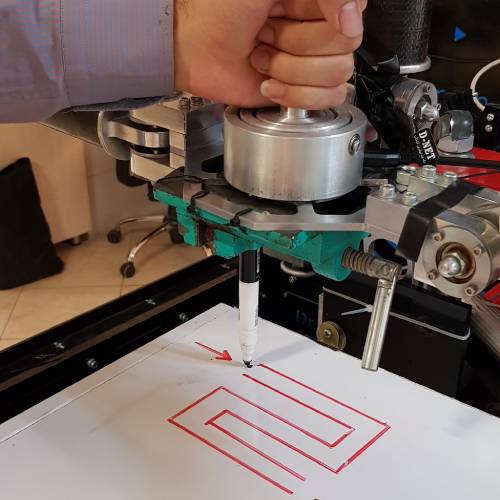
طراحی و ساخت حسگر نیرویی صلب بر اساس حسگر اثرهال
اطلاعات بیشتر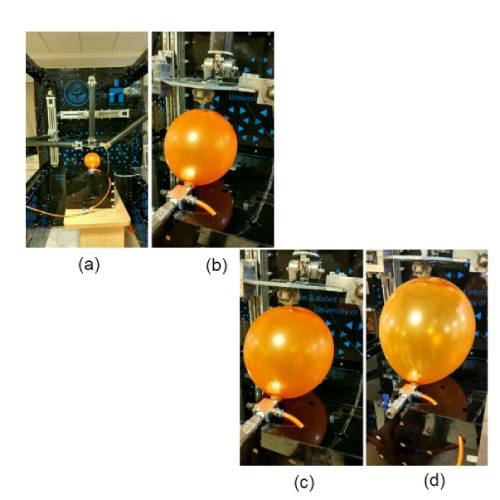
ساخت حسگر نیرویی منعطف برگرفته از پوست انسان
اطلاعات بیشتر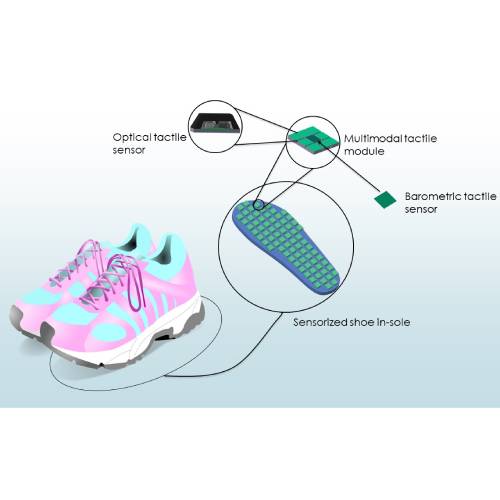
طراحی و ساخت حسگر لمسی الهام گرفته از زیست برای کفش هوشمند
اطلاعات بیشتر
طراحی ساخت و کنترل دست رباتیک با عملگر کمتر
اطلاعات بیشتر
تشخیص نحوه برداشت رباتیکی اجسام به کمک شبکههای عصبی عمیق
اطلاعات بیشتر
تشخیص محل گرفتن توسط ربات با استفاده از مدل سهبعدی روشهای مبتنی بر شبکههای عصبی و یادگیری تعاملی
اطلاعات بیشتر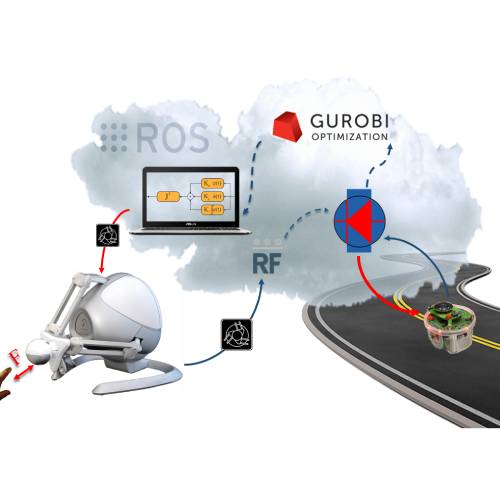
طراحی و توسعه محیط مجازی جراحی دندان پزشکی و اجرای امپدانس کنترل بر روی ربات فالکون
اطلاعات بیشتر
تقلید حرکات انسان توسط ربات انسان نمای نائو
اطلاعات بیشتر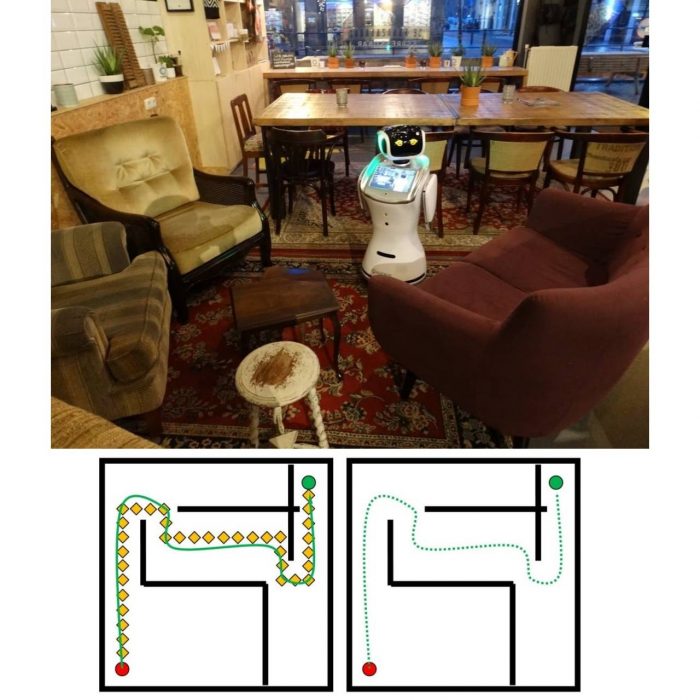
موقعیتیابی و مسیریابی موبایل رباتها با استفاده از شبکههای عصبی عمیق
اطلاعات بیشتر
کنترل از راه دور و مسیریابی ربات اجتماعی Sanbot در محیطهای داخلی با در نظر گرفتن ورود و خروج از درب بر پایه الگوریتمهای هوشمند مبتنی بر دادههای انسانی
اطلاعات بیشتر
موقعیتیابی و مسیریابی ربات Sanbot توسط حسگرهای بصر
اطلاعات بیشتر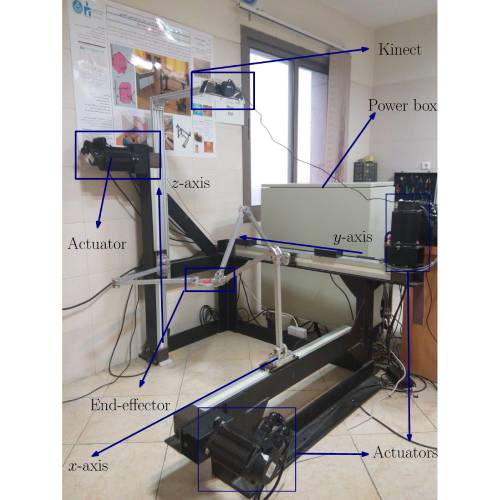
شناسایی و کنترل دینامیکی مکانیزم موازی 3 درجه آزادی مستقل (تریپترون) و ساخت واسط تعامل انسان و ربات
اطلاعات بیشتر
طراحی، ساخت و بهینه سازی کینتواستاتیکی ربات موازی 3 درجه آزادی با در نظر گرفتن آنالیز صلبیت و تداخلات مکانیکی
اطلاعات بیشتر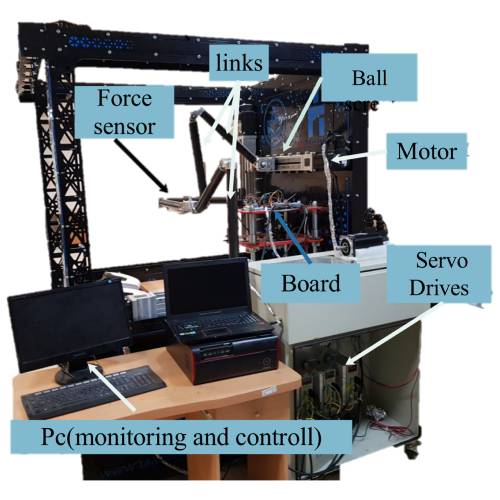
شناسایی و کنترل ربات 3 درجه آزادی مستقل خطی و ساخت حسگر نیروی 3 محوره با هدف تعامل انسان و ربات
اطلاعات بیشتر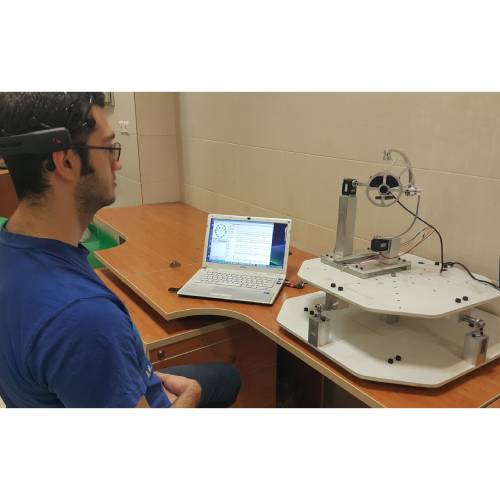
طراحی و ساخت ربات دو درجه آزادی جهت تعامل حرکتی با چشم انسان با استفاده از سیگنالهای مغز
اطلاعات بیشتر
مدلسازی دینامیکی ربات 3 درجه آزادی چشم چابک
اطلاعات بیشتر
طراحی، ساخت و کنترل ربات ۳ درجه آزادی دیتای تارلب
اطلاعات بیشتر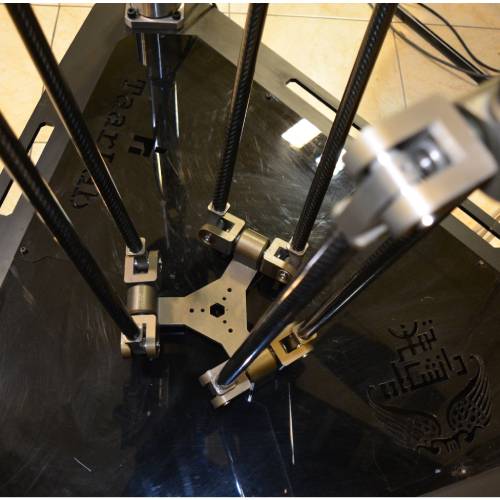
تحلیل دینامیکی، شناسایی و کنترل ربات ۳ درجه آزادی دلتا با روش پارامترهای اینرسی پایه
اطلاعات بیشتر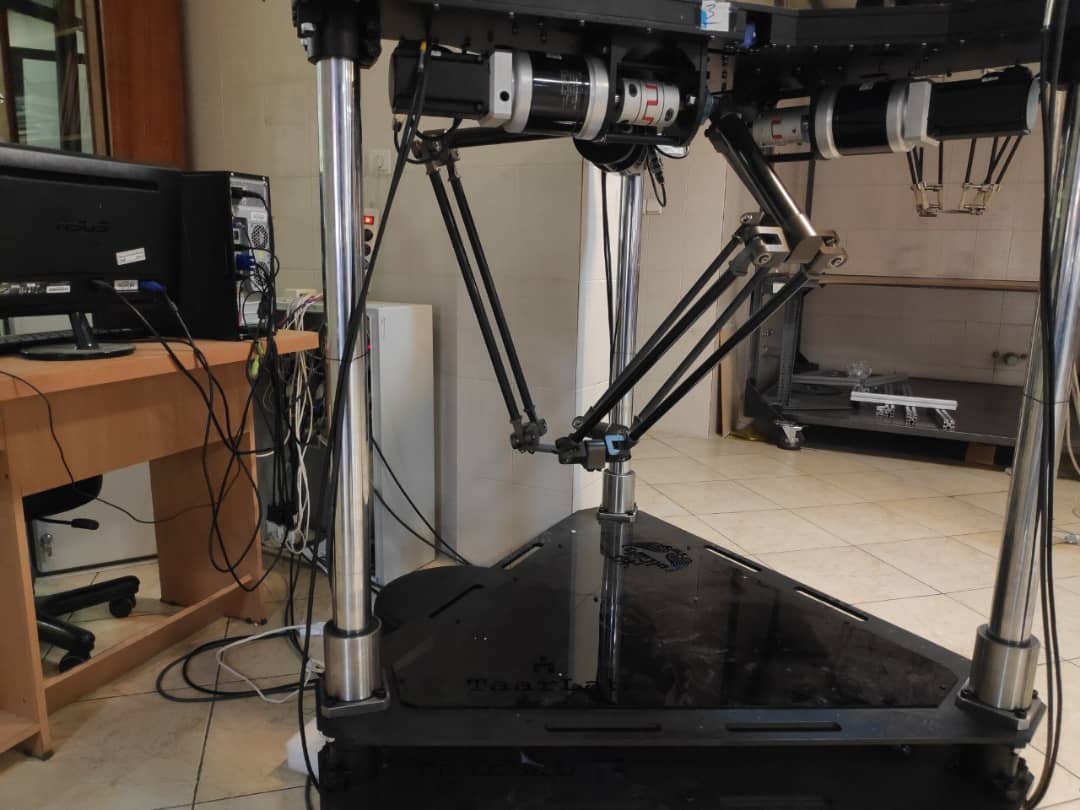
شناسایی و کنترل ربات موازی 3 درجه آزادی دلتا به منظور انجام گذاشت و برداشت با استفاده از یادگیری ماشین
اطلاعات بیشتر
شناسایی و کالیبراسیون پارامترهای کینتواستاتیک ربات موازی 3 درجه آزادی دلتا بر پایه الگوریتمهای هوشمند
اطلاعات بیشتر
بهینهسازی فضای کاری رباتهای موازی با روش آنالیز بازهای و روش هندسی
اطلاعات بیشتر
طراحی و کنترل مکانیزمهای موازی براساس فضای کاری عاری از تکینگی
اطلاعات بیشتر
طراحی، ساخت و کنترل ربات دلتای افزونه
اطلاعات بیشتر
شناسایی و کنترل سینماتیکی ربات موازی 4 درجه آزادی دلتا
اطلاعات بیشتر
شناسایی دینامیکی و کنترل یک ربات کابلی فضایی به منظور تعقیب اجسام با پردازش تصویر
اطلاعات بیشتر
بهینهسازی حساسیت سینماتیکی و فضای کاری مکانیزمهای موازی صفحهای
اطلاعات بیشتر
سنتز و کنترل رباتهای موازی کابلی با استفاده از الگوریتم بهینهسازی محدب
اطلاعات بیشتر
طراحی و توسعه ربات 3 درجه آزادی کابلی
اطلاعات بیشتر
کنترل ربات کابلی و اسکن سهبعدی اجسام با استفاده از این ربات
اطلاعات بیشتر
کنترل یک ربات موازی معلق کابلی به منظور فیلم برداری هوشمند از بازی فوتبال و بدست آوردن آمار بازی به کمک تکنیکهای بینایی ماشین
اطلاعات بیشتر
طراحی و توسعه ربات 6 درجه آزادی نیوماتیکی بر پایه پلتفرم گاف-استوارت
اطلاعات بیشتر
ساخت کفی کفش حساس به فشار
اطلاعات بیشتر
طراحی و ساخت حسگر نوری و استفاده از آن در کفش هوشمند
اطلاعات بیشتر
استفاده از کفش هوشمند و حسگر منعطف برای بهبود کنترل پایداری ربات انسان نمای نائو در مقابل اغتشاش
اطلاعات بیشتر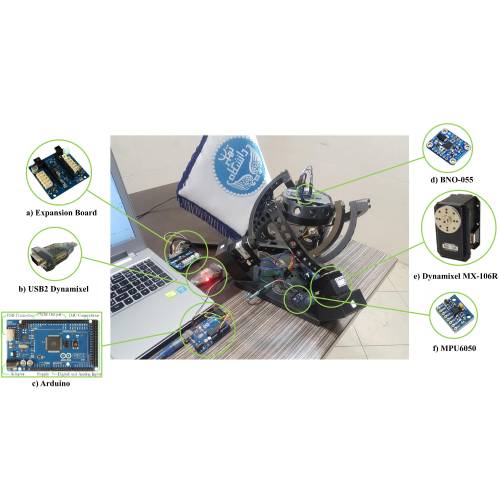
کنترل هوشمند رباتهای موازی
اطلاعات بیشتر
طراحی و پیادهسازی سیستم کنترل برای ربات موازی 3 درجه آزادی دلتا بر مبنای روشهای یادگیری
اطلاعات بیشتر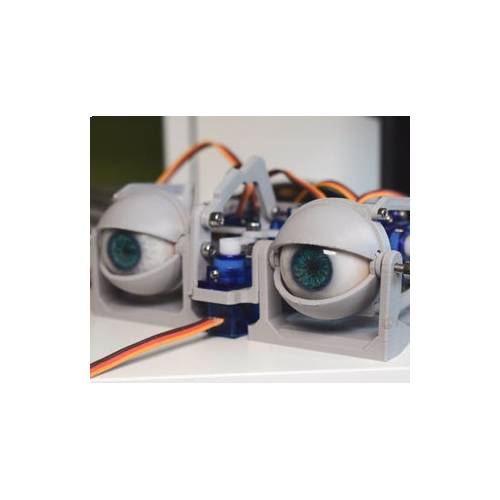
ساخت و کنترل یک ربات به منظور تقلید حرکت سر انسان به وسیله پردازش تصویر
اطلاعات بیشتر
طراحی، ساخت و کنترل ربات ۳ درجه آزادی دیتای تارلب
اطلاعات بیشتر
تحلیل دینامیکی، شناسایی و کنترل ربات ۳ درجه آزادی دلتا با روش پارامترهای اینرسی پایه
اطلاعات بیشتر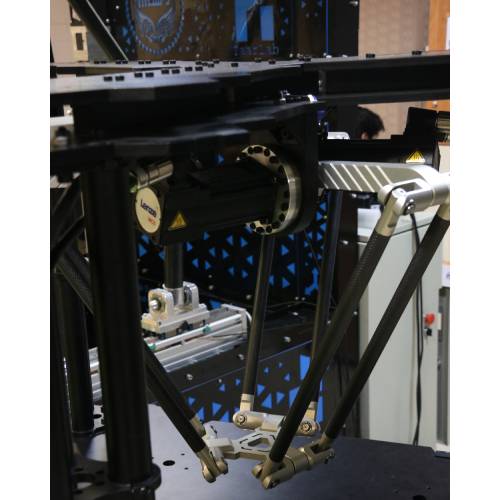
شناسایی و کنترل ربات موازی 3 درجه آزادی دلتا به منظور انجام گذاشت و برداشت با استفاده از یادگیری ماشین
اطلاعات بیشتر
شناسایی و کالیبراسیون پارامترهای کینتواستاتیک ربات موازی 3 درجه آزادی دلتا بر پایه الگوریتمهای هوشمند
اطلاعات بیشتر
بهینهسازی فضای کاری رباتهای موازی با روش آنالیز بازهای و روش هندسی
اطلاعات بیشتر
طراحی و کنترل مکانیزمهای موازی براساس فضای کاری عاری از تکینگی
اطلاعات بیشتر
شناسایی و کنترل سینماتیکی ربات موازی 4 درجه آزادی دلتا
اطلاعات بیشتر
طراحی، ساخت و کنترل ربات دلتای افزونه
اطلاعات بیشتر
شناسایی و کنترل دینامیکی مکانیزم موازی 3 درجه آزادی مستقل (تریپترون) و ساخت واسط تعامل انسان و ربات
اطلاعات بیشتر
طراحی، ساخت و بهینه سازی کینتواستاتیکی ربات موازی 3 درجه آزادی با در نظر گرفتن آنالیز صلبیت و تداخلات مکانیکی
اطلاعات بیشتر
شناسایی و کنترل ربات 3 درجه آزادی مستقل خطی و ساخت حسگر نیروی 3 محوره با هدف تعامل انسان و ربات
اطلاعات بیشتر
طراحی و توسعه ربات 6 درجه آزادی نیوماتیکی بر پایه پلتفرم گاف-استوارت
اطلاعات بیشتر
طراحی و ساخت ربات دو درجه آزادی جهت تعامل حرکتی با چشم انسان با استفاده از سیگنالهای مغز
اطلاعات بیشتر
مدلسازی دینامیکی ربات 3 درجه آزادی چشم چابک
اطلاعات بیشتر
طراحی و توسعه محیط مجازی جراحی دندان پزشکی و اجرای امپدانس کنترل بر روی ربات فالکون
اطلاعات بیشتر
شناسایی دینامیکی و کنترل یک ربات کابلی فضایی به منظور تعقیب اجسام با پردازش تصویر
اطلاعات بیشتر
بهینهسازی حساسیت سینماتیکی و فضای کاری مکانیزمهای موازی صفحهای
اطلاعات بیشتر
سنتز و کنترل رباتهای موازی کابلی با استفاده از الگوریتم بهینهسازی محدب
اطلاعات بیشتر
طراحی و توسعه ربات 3 درجه آزادی کابلی
اطلاعات بیشتر
کنترل ربات کابلی و اسکن سهبعدی اجسام با استفاده از این ربات
اطلاعات بیشتر
کنترل یک ربات موازی معلق کابلی به منظور فیلم برداری هوشمند از بازی فوتبال و بدست آوردن آمار بازی به کمک تکنیکهای بینایی ماشین
اطلاعات بیشتر
موقعیتیابی و مسیریابی موبایل رباتها با استفاده از شبکههای عصبی عمیق
اطلاعات بیشتر
کنترل از راه دور و مسیریابی ربات اجتماعی Sanbot در محیطهای داخلی با در نظر گرفتن ورود و خروج از درب بر پایه الگوریتمهای هوشمند مبتنی بر دادههای انسانی
اطلاعات بیشتر
موقعیتیابی و مسیریابی ربات Sanbot توسط حسگرهای بصر
اطلاعات بیشتر
تقلید حرکات انسان توسط ربات انسان نمای نائو
اطلاعات بیشتر
طراحی ساخت و کنترل دست رباتیک با عملگر کمتر
اطلاعات بیشتر
تشخیص نحوه برداشت رباتیکی اجسام به کمک شبکههای عصبی عمیق
اطلاعات بیشتر
تشخیص محل گرفتن توسط ربات با استفاده از مدل سهبعدی روشهای مبتنی بر شبکههای عصبی و یادگیری تعاملی
اطلاعات بیشتر
ساخت و کنترل یک ربات به منظور تقلید حرکت سر انسان به وسیله پردازش تصویر
اطلاعات بیشتر
طراحی و ساخت حسگر نیرویی صلب بر اساس حسگر اثرهال
اطلاعات بیشتر
ساخت حسگر نیرویی منعطف برگرفته از پوست انسان
اطلاعات بیشتر
طراحی و ساخت حسگر لمسی الهام گرفته از زیست برای کفش هوشمند
اطلاعات بیشتر
طراحی و ساخت بازوی توانبخشی
اطلاعات بیشتر
ساخت کفی کفش حساس به فشار
اطلاعات بیشتر
طراحی و ساخت حسگر نوری و استفاده از آن در کفش هوشمند
اطلاعات بیشتر
استفاده از کفش هوشمند و حسگر منعطف برای بهبود کنترل پایداری ربات انسان نمای نائو در مقابل اغتشاش
اطلاعات بیشتر
بازشناسی چهره انسان بر مبنای شاخصهای هندسی مبتنی بر شبکههای عصبی عمیق
اطلاعات بیشتر
تشخیص هویت مبتنی بر صدای انسان با استفاده از شبکههای عصبی عمیق و براساس شاخصهای هندسی
اطلاعات بیشتر
توسعه الگوریتم تشخیص هویت از روی ابعاد بدنی
اطلاعات بیشتر
توسعه الگوریتم تشخیص شستشوی صحیح دست
اطلاعات بیشتر
جهتیابی خودکار رباتهای پرنده به کمک روشهای یادگیری عمیق
اطلاعات بیشتر
کنترل هوشمند رباتهای موازی
اطلاعات بیشتر
طراحی و پیادهسازی سیستم کنترل برای ربات موازی 3 درجه آزادی دلتا بر مبنای روشهای یادگیری
اطلاعات بیشتردستهبندیها