سال ساخت: —
اسم ربات: —
سازندگان: —
کاربرد ربات: —
توضیحات
لورم ایپسوم متن ساختگی با تولید سادگی نامفهوم از صنعت چاپ، و با استفاده از طراحان گرافیک است، چاپگرها و متون بلکه روزنامه و مجله در ستون و سطرآنچنان که لازم است، و برای شرایط فعلی تکنولوژی مورد نیاز، و کاربردهای متنوع با هدف بهبود ابزارهای کاربردی می باشد، کتابهای زیادی در شصت و سه درصد گذشته حال و آینده، شناخت فراوان جامعه و متخصصان را می طلبد، تا با نرم افزارها شناخت بیشتری را برای طراحان رایانه ای علی الخصوص طراحان خلاقی، و فرهنگ پیشرو در زبان فارسی ایجاد کرد، در این صورت می توان امید داشت که تمام و دشواری موجود در ارائه راهکارها، و شرایط سخت تایپ به پایان رسد و زمان مورد نیاز شامل حروفچینی دستاوردهای اصلی، و جوابگوی سوالات پیوسته اهل دنیای موجود طراحی اساسا مورد استفاده قرار گیرد.لورم ایپسوم متن ساختگی با تولید سادگی نامفهوم از صنعت چاپ، و با استفاده از طراحان گرافیک است، چاپگرها و متون بلکه روزنامه و مجله در ستون و سطرآنچنان که لازم است، و برای شرایط فعلی تکنولوژی مورد نیاز، و کاربردهای متنوع با هدف بهبود ابزارهای کاربردی می باشد، کتابهای زیادی در شصت و سه درصد گذشته حال و آینده، شناخت فراوان جامعه و متخصصان را می طلبد، تا با نرم افزارها شناخت بیشتری را برای طراحان رایانه ای علی الخصوص طراحان خلاقی، و فرهنگ پیشرو در زبان فارسی ایجاد کرد، در این صورت می توان امید داشت که تمام و دشواری موجود در ارائه راهکارها، و شرایط سخت تایپ به پایان رسد و زمان مورد نیاز شامل حروفچینی دستاوردهای اصلی، و جوابگوی سوالات پیوسته اهل دنیای موجود طراحی اساسا مورد استفاده قرار گیرد.

توضیحات
لورم ایپسوم متن ساختگی با تولید سادگی نامفهوم از صنعت چاپ، و با استفاده از طراحان گرافیک است، چاپگرها و متون بلکه روزنامه و مجله در ستون و سطرآنچنان که لازم است، و برای شرایط فعلی تکنولوژی مورد نیاز، و کاربردهای متنوع با هدف بهبود ابزارهای کاربردی می باشد، کتابهای زیادی در شصت و سه درصد گذشته حال و آینده، شناخت فراوان جامعه و متخصصان را می طلبد، تا با نرم افزارها شناخت بیشتری را برای طراحان رایانه ای علی الخصوص طراحان خلاقی، و فرهنگ پیشرو در زبان فارسی ایجاد کرد، در این صورت می توان امید داشت که تمام و دشواری موجود در ارائه راهکارها، و شرایط سخت تایپ به پایان رسد و زمان مورد نیاز شامل حروفچینی دستاوردهای اصلی، و جوابگوی سوالات پیوسته اهل دنیای موجود طراحی اساسا مورد استفاده قرار گیرد.
پژوهشگران
ارسلان امرعلیزاده
کلمات کلیدی
حسگر لمسی نرم، بارومتر، کنترل ادمیتانس فعال، تعامل انسان و ربات

توضیحات
لورم ایپسوم متن ساختگی با تولید سادگی نامفهوم از صنعت چاپ، و با استفاده از طراحان گرافیک است، چاپگرها و متون بلکه روزنامه و مجله در ستون و سطرآنچنان که لازم است، و برای شرایط فعلی تکنولوژی مورد نیاز، و کاربردهای متنوع با هدف بهبود ابزارهای کاربردی می باشد، کتابهای زیادی در شصت و سه درصد گذشته حال و آینده، شناخت فراوان جامعه و متخصصان را می طلبد، تا با نرم افزارها شناخت بیشتری را برای طراحان رایانه ای علی الخصوص طراحان خلاقی، و فرهنگ پیشرو در زبان فارسی ایجاد کرد، در این صورت می توان امید داشت که تمام و دشواری موجود در ارائه راهکارها، و شرایط سخت تایپ به پایان رسد و زمان مورد نیاز شامل حروفچینی دستاوردهای اصلی، و جوابگوی سوالات پیوسته اهل دنیای موجود طراحی اساسا مورد استفاده قرار گیرد.
پژوهشگران
نجلا نفیله
کلمات کلیدی
حسگر لمسی نرم، بارومتر، کنترل ادمیتانس فعال، تعامل انسان و ربات
توضیحات
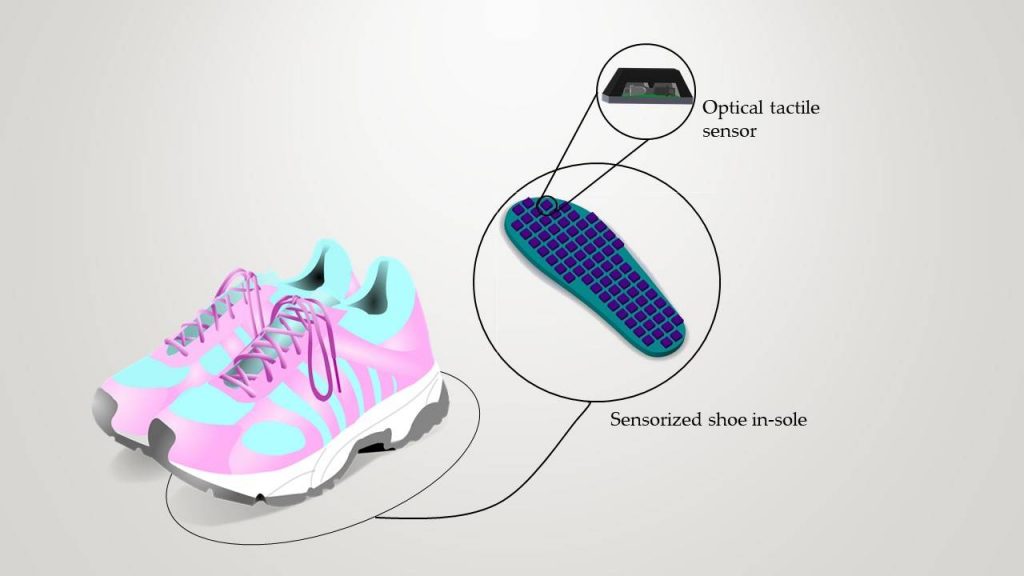
ربات نائو یک ربات انسان نما در حوزه های تحقیقات رباتیک و تعامل انسان با ربات (HRI) است. اما به دلیل مشکلات طراحی، نوع سنسور به کار رفته (FSR) و مکان قرار گرفتن آنها، ربات نائو قادر به اندازه گیری مناسب ،دقیق و صحیح مقدار فشار وارد شده به نواحی متفاوت در کف پا (Plantar Pressure Distribution) را ندارد و در نتیجه فیدبک مناسبی از مسیر مرکز جرم (COM Trajectory) ، مرکز فشار (COP) و… را به ربات انتقال نمی دهد و نمیتوان از فیدبکPlantar Pressure Distribution درکنترل کننده های طراحی شده برای Push recovery , پایداری دینامیک و استاتیک، path planning و … این ربات استفاده کرد. در این پروژه سعی میشود با ساخت و استفاده از یک کفش هوشمند با سنسور های دقیق و مناسب برای کاربرد های اشاره شده، فیدبک مناسبی از فشار های محل تعامل زمین و ربات ارائه شود و با پارامتر های پیشین ربات که از چهار FSR تعبیه شده در کف پای ربات به دست می آید مقایسه شود. با استفاده از کفش طراحی شده و سنسور های جدید میتوان سیستم های push recovery در حالت ایستا و پویا موجود را بهبود داد و پایداری نائو را در برابر اغتشاش خارجی به نحو مناسب تری حفظ کرد. از نتایج مربوط به مرکز فشار محاسبه شده توسط کفش برای فیدبک دادن به ربات استفاده شده که از این بازخورد و اطلاعات جدید میتوان برای ارایه یک کنترل کننده پایداری و تعادل جدید استفاده کرد. به منظور صحت سنجی روش انجام شده، نتایج بدست را میتوان با نتایج مرجع که درستی آن ثابت ده است مقایسه کرد. به همین منظور مرکز جرم ربات با استفاده از پیاده سازی بر اساس سنسور های از پیش تعبیه شده در کتابخانه های استاندارد Aldebaran انجام شد و با مرکز جرم محاسبه شده به کمک سنسور های فشار تعبیه شده در کفش طراحی شده برای ربات مقایسه و مشاهده شد که تا حد زیادی به هم نزدیک هستند که می توان از این نتیجه در زمینه صحت سنجی اطلاعات استخراج شده از کقش طراحی شده استفاده کرد. می توان از روش های پیشرفته تر sensor fusion برای دقیق تر کردن و بهبود هرچه بیشتر کنترلر ارایه شده استفاده کرد به این صورت که با استخراج یک مدل از اطلاعات بدست آمده کفش هوشمند می توان وزن هرکدام از فیدبک ها را به نحو دقیق تر تعیین کرد تا خروجی بهینه و خطا کمینه شود. یکی از کاربرد هایی که این کفش می تواند داشته باشد استفاده از آن به عنوان یک ابزار برای بهتر کردن فرآیند بازیابی تعادل است که قصد پیاده سازی آن توسط کفش هوشمند در آینده وجود دارد. همینطور درهنگام تقلید رفتار و کار توسط نائو حفظ تعادل و داشتن اطلاعات پارامترهای کنترلی ضروری است. در نتیجه از کفش هوشمند میتوان برای حفظ تعادل و balance ربات هنگام تقلید رفتار نیز استفاده کرد. یکی از اصلی ترین مشکلات حفظ پایداری نائو در سطح شیب دار، لیز خوردن است. در کفش سه بعدی طراحی شده به منظور جواب دادن به این مشکل میتوان شیار دار کردن سطح خارجی کفش که بر روی زمین قرار میگیرد را به صورت شیار دار طراحی کرد تا ربات به این وسیله پایداری بیشتری داشته باشد.
پژوهشگران
آرمان خزایی، مهدی شایان
کلمات کلیدی
ربات انسان نما، حسگر نیرو/گشتاور، پوستهای رباتیکی
به زودی این بخش تکمیل خواهد شد.