سال ساخت: —
اسم ربات: —
سازندگان: —
کاربرد ربات: —
توضیحات
واسط لامسه ای Novint Falcon ساخت شرکت Novint در واقع یک ربات موازی دلتای ۳ درجه آزادی می باشد که اولین بار توسط کلاول در سال ۱۹۹۰ ارائه شد. ربات های موازی با وجود فضای کاری محدود تری که نسبت به ربات های سری دارند، از سرعت، شتاب و سختی بالاتری نسبت به ربات های سری برخوردار هستند که کاربرد آن ها را در موارد مربوط به بازخورد لامسه ای توجیه پذیر می نماید. تفاوت اساسی ربات فلکون با ساختار اولیه ربات دلتا در جایگزینی مفصل های کروی با لولایی است. این ربات با توجه به قیمت پایینی که نسبت به سایر واسط های لامسه ای دارد، مورد توجه بسیاری از پژوهش گران قرار گرفته است. این ربات از ۳ موتور جریان مستقیم بدون جاروبک به نام Mabuchi RS-555PH-15280 بهره می برد. از این موتور ها توسط ۳ عدد انکودر چهار وضعیته هم محور با ۳۲۰ خط بر یک دوران، بازخورد موقعیت گرفته می شود. فرامین ارسالی به ربات که شامل فرامینی است که به عملگر ها منتقل می شود، بر بسترUSB ارسال می شود. یک سفت افزارکه بر برد داخلی ربات قرار دارد، وظیفه تفسیر این فرامین را بر عهده دارد. همچنین اطلاعات ارسالی از طرف ربات که شامل اطلاعات انکودر ها و وضعیت دکمه است نیز بر بستر USB به رایانه منتقل می شود. شایان ذکر است که فرامین ارسالی به ربات، فرمان گشتاور عملگرها است و این فرامین در مقیاس دیجیتال در بازه ۴۰۹۶+ تا ۴۰۹۶- دریافت می کند.
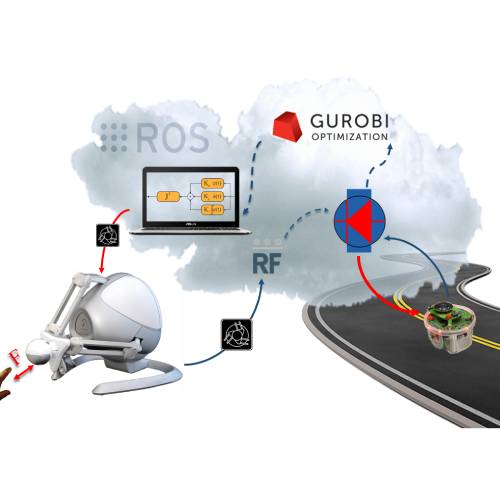
بسته توسعه نرم افزاری ارائه شده توسط شرکت برای کار با این ربات از نوع متن بسته است و فقط تحت سیستم عامل ویندوز کار می کند. علاوه بر این، این بسته امکان ارسال فرمان مستقیم به موتور ها را ندارد، به همین منظور در این تحقیق از یک درایور متن باز تحت سیستم عامل لینوکس به نام libnifalcon به عنوان نود دریافت کننده اطلاعات از ربات و ارسال فرامین کنترلی به ربات در محیط ROS استفاده گردید.
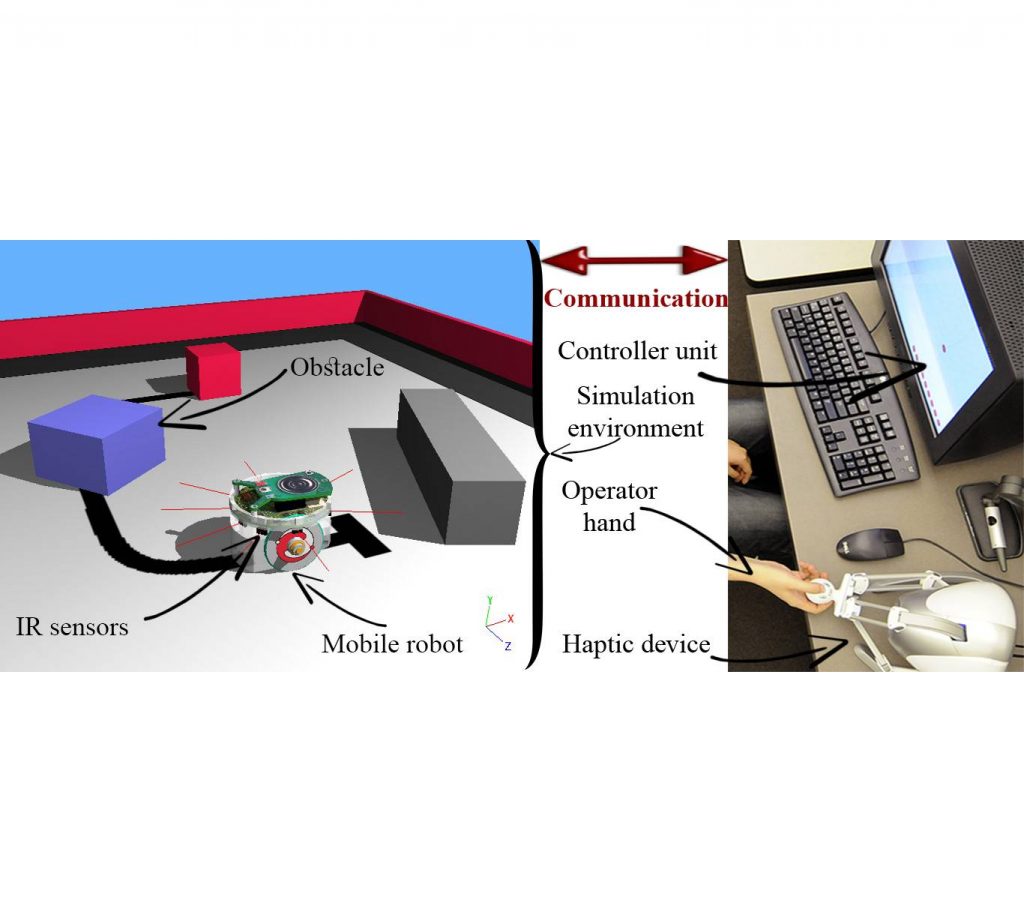
به منظور پیاده سازی کنترل کننده حلقه باز امپدانس، پارامترهای مجهول در معادلات دینامیکی ربات از جمله ضرایب اصطکاکی در مفاصل شناسایی گردید. بر مبنای مدل بدست آمده، کنترل کننده طراحی شد که نیروی مورد نیاز برای اعمال به دست کاربر را با در نظر گرفتن پرامتر های دینامیکی ربات مثل اینرسی حرکت و اصطکاک مفاصل ، به صورت دقیق تر اعمال کند. علاوه بر کنترل کننده ای امپدانس، دستورهای ارسالی توسط یک کنترل کننده داخلی به موتورها اعمال می شوند . این کنترل کننده های در پکیج رسمی یک کنترل کننده ی PID است. به منظور افزایش دقت ربات می بایست این کنترل کننده نیز بهبود یابد. در این راستا، با استفاده از مفهوم طول مسیر فاز، کنترل کننده ی PID کمینه نوسان برای ربات طراحی شد تا در صورت اعمال دستورات کنترلی، ربات کمترین نواسان در مجری نهایی را اعمال نماید. در پژوهشی دیگر، از این ربات به عنوان ربات راهبر در سیستم راهبر و پیرو (Master and Slave system) استفاده شد. بدین منظور، یک طراح مسیر بر مبنای بهینه سازی محدب سرعت و راستای ربات پیرو را محسابه می کند. در این مطالعه از یک ربات دو چرخ به نام Epuck به عنوان ربات پیرو استفاده شد. مقادیر محاسبه شده، به فضای کاری مجری نهایی ربات قلکون نگاشت می شود و واسط لامسه ای وظیفه دارد در صورت تفاوت میان راستا و سرعت بهینه برای اجتناب از مانع با کمترین نوسان و کمترین شوک به دست کاربر، به دست وی نیروی بازخوردی اعمال کند تا وی را به مسیر عاری از برخورد راهنمایی نماید.
توضیحات
این پروژه کنترل مشترک یک ربات متحرک در محیط ناشناخته ی پویا به وسیله ی یک واسط لامسه ای را به منظور یک حرکت عاری از برخورد با موانع پویا را بررسی می نماید. در این راستا، با استفاده از مفهوم کنترل افق پیش رو و محدب سازی قیود حرکت و سینماتیک ربات متحرک الگوریتمی که به صورت تقریبا بهینه قادر به انجام طراحی حرکت است طراحی می گردد. قیود عدم برخورد با استفاده از مفهوم مخروط عدم تصادم لحاظ می گردند. الگوریتم پیشنهادی با حل یک مساله بهینه سازی محدب تخمینی با کمک برنامه نویسی مختلط با اعداد صحیح قادر به یافتن جهت و مقدار سرعت بهینه برای ربات متحرک می باشد. در کنار این واحد کنترلی، یک کنترل کننده مبتنی بر کنترل امپدانس، ربات واسط لامسه ای را کنترل می کند. کنترل کننده ی ربات لامسه ای طوری طراحی می گردد تا کمینه نواسان برای سیستم را به ارمغال اورد. بدین منظور از نمایه ی مقدار طول مسیر فاز استفاده می گردد. پیاده سازی الگوریتم ها نشان داد که الگوریتم معرفی شده از روش های متداول مانند الگوریتم ژنتیک یا میدان پتانسیل عملکرد بهتری دارد.
پژوهشگران
نیما کرباسیزاده، مجتبی زارعی
کلمات کلیدی
واسط لامسه ای، راهبر و پیشرو، کنترل امپدانس، شناسایی دینامیکی، کنترل کننده ضد نوسان