

سال ساخت: —
اسم ربات: —
سازندگان: —
کاربرد ربات: —
توضیحات
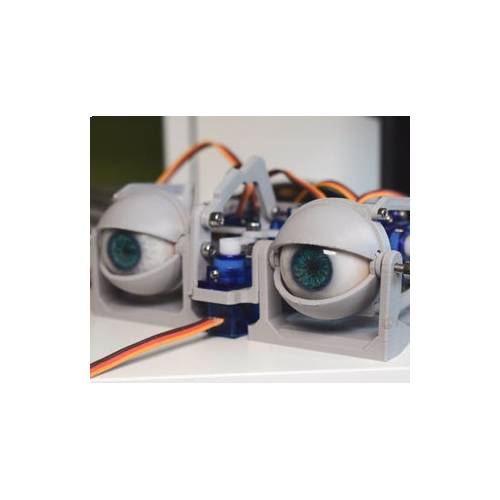
برای یک ربات سه درجه آزادی به پیاده سازی مکانیزم کارکرد چشم این ربات پرداخته و اصول کنترلی و طراحی این مکانیزم برای تقلید حرکات چشم فرد رو به روی آن پیاده میشود. اخیراً در یکی دیگر از تحقیقات انجام گرفته از دوربین دید سه به منظور دریافت حرکات انسان استفاده شده، بدین منظور از این روش و با استفاده از روشی که شرح داده شده به پیاده سازی تقلید حرکات چشم انسان برای ربات پرداخته ایم و از مفاهیم پردازش تصویر در این زمینه یاری جسته ایم. همچنین روشی کارآمد به منظور نگاشت حرکات انسان به ربات انجام گردیده است، که در این پروژه با استفاده از منابع موجود به پیاده سازی تقلید چشم می پردازیم. این پروژه همچنین با استفاده از مفاهیم پردازش تصویر و یادگیری ماشین پیاده میشود
هدف ایجاد یک تعامل واقعی بین یک انسان و ربات میباشد و ضرورت آن هم استفاده از ربات در مکان هایی است که امکان حضور انسان نمی باشد ، برای چنین استفاده ای نیاز به تعامل انسان و ربات میباشد که هدف نهایی پروژه نیز همین میباشد.
روش های گوناگونی برای انجام پروژه موجود است که ابتدا به طراحی مکانیکی آن پرداخته و مراحل شبیه سازی مکانیکی را انجام داده و سپس به مرحله ساخت میرسیم و پس از ساخت به کنترل آن میپردازیم و با استفاده از دوربین به آن فیدبک کنترل میدهیم وسپس بااستفاده از این فیدبک و کنترلر مناسب سیستم را کنترل کرده وبه واسطه دوربین دید سه بعدی که توسط بسته نرم افزاری سیستم عامل ربات (راس) راه اندازی میشود، دریافت میگردد. با توجه به اختلاف ابعادی میان انسان و ربات، حرکات دریافتی به ابعاد ربات نگاشت میشود. بعد از اعمال نگاشت،حل سینماتیک مستقیم و معکوس ربات ارائه میگردد در نهایت به پیاده سازی تقلید ربات ازچشم انسان پرداخته و قسمت های کد نویسی را تکمیل کرده. و مرحله تقلید چشم انسان توسط ربات را پیاده میکنیم.
توضیحات
در دنیای امروز گرایش شدیدی متوجه موضوعات مربوط به پردازش تصویر به همراه یادگیری ماشین شده است . در این پروژه علاوه بر این دو بحث های رباتیکی نیز وارد شده . ترکیب رباتیک ، پردازش تصویر و یادگیری ماشین هم اکنون یکی از داغ ترین مباحث در رشتههای مهندسی میباشد. در اینجا هدف تعامل انسان و ربات است که به منظور استفاده از آن در موقعیتهایی که حضور انسان ممکن نیست میباشد . در این پروژه برای یک ربات 3 درجه آزادی مکانیزم چشم انسان با 2 درجه آزادی به همراه سر انسان طراحی و ساخته خواهد شد . همچنین بوسیله دوربینی که روی آن قرار خواهد گرفت چهره فرد روبروی آن بدون هیچگونه ادوات اضافی تشخیص داده میشود و متقابلا براساس احساس چهر فرد ربات واکنش مناسب را خواهد داد . برای رسیدن به این مهم باید از روشهای مختلف سینماتیک معکوس بهره گرفت . روش هایی عددی به این منظور مورداستفاده قراره گرفتهاند بطوریکه با تحلیل دادده های حاصل از دوربین قرار گرفته عملکرد مناسب حاصل گردد و نگاشت حرکات فرد رویرو نگاشت شود . در ایتدا به طراحی و شبیه سازی های مکانیکی انجام خواهد شد . پس از آن ساخت مدل را با فلز انجام خواهیم داد . پس از آن به بررسی روش های موجود برای کنترل آن خواهیم پرداخت و کار برای طراحی کنترل کننده با استفاده از داده های حاصله از دوربین را شروع خواهیم کرد . در این زمینه مطالعاتی چند صورت گرفته است بطوریکه با ارائه یک کنترل کننده که در برابر عدم قطعیت ها و اغتشاشات مقاوم است برای یک مکانیزم سه درجه آزادی طرح شده است . همچنین بلادرنگ بودن کنترل کننده نیز باید انجام پذیرد . کنترل کننده طوری طراحی میگردد که در شرایط مختلف عملکرد های متفاوت انجام دهد . به همین منظور یک سیستم یادگیری برای آن توسعه داده خواهد شد . و درنهایت تست های لازم انجام خواهد رفت .برنامه زمانی:1.مطالعات سینماتیکی ربات2.طراحی و ساخت مکانیزم3.کار بر روی کنترل چشم در 4.تست های اولیه 5.کار بر روی برنامهنویسی و یادگیری ماشین
پژوهشگران
میلاد عسکری، امیرمحمد رادمهر
کلمات کلیدی
تست تقلید و مطالعه سینماتیکی، ربات چشم چابک

