سال ساخت: —
اسم ربات: —
سازندگان: —
کاربرد ربات: —
توضیحات
در سالهای اخیر علوم رباتیک در مرکز توجه محققان بسیاری از زمینه ها بوده است. استفاده از ربات ها به دلیل دقت و سرعت بالا ، استهلاک کمتر و چالش های مدیریت نیروی انسانی در صنعت از اهمیت بالایی برخوردار است. سیستم های رباتیک را می توان به دو گروه اصلی تقسیم کرد: ربات های پایه متحرک و ربات های پایه ثابت. در میان ربات های ثابت دو دسته قابل توجه وجود دارد که از آنها به عنوان ربات های سری و موازی یاد می شود. ربات های سری ربات هایی هستند که فقط شامل یک زنجیره سینماتیک مستقل هستند که End-Effector (EE) را به پایه ثابت ربات متصل می کنند. در واقع ، این ربات ها پشت سر هم اتصالات مفاصل و لینک ها را دارند. این ربات ها از اولین ربات هایی هستند که در زمینه رباتیک معرفی شده اند و به دلیل کاربردهای بیشماری که دارند، برای برخی از کاربردهای خاص استقبال زیادی در صنعت از آن ها می شود.
در مقابل، ربات موازی رباتی است که EE را از طریق حداقل دو زنجیره سینماتیک مستقل به پایه ثابت ربات متصل می کند. به دلیل کاربردهای گوناگون و مزایای استفاده از ربات های موازی، این ربات ها همیشه مورد پسند محققان حوزه رباتیک هستند. از ربات های موازی بیشتر در کاربردهایی استفاده می شود که در آنها به دقت، سختی و ظرفیت بالا نیاز باشد. این نوع ربات ها اغلب در بسته بندی محصولات غذایی ، جرثقیل های صنعتی، شبیه ساز هواپیماها، ماشین های CNC، فیلمبرداری استادیوم و هنگام جابجایی اجسام سنگین مورد استفاده قرار می گیرند. از جمله مزایای ربات های موازی نسبت به ربات های سری، سرعت و دقت بالاتر، سختی بیشتر به دلیل ساختار مکانیکی ذاتی و توانایی جابجایی بارهای سنگین تر می توان نام برد. در مقابل، از جمله معایب ربات های موازی در مقایسه با ربات های سری، فضای کاری محدودتر به دلیل احتمال بالای برخورد لینک ها و وجود اتصالات غیرفعال ذکر کرد. علاوه بر این، حضور گسترده نقاط تکینگی باعث می شود که سختی آنها دراین نقاط از بین برود و ربات دارای DOF غیرقابل کنترل بیشتری باشد. از معروف ترین انواع ربات های موازی که همگی دارای کاربردهای صنعتی و معروف هستند، دلتا، که مورد توجه این پروژه می باشدGough-Stewart ، Agile eye ، Novint Falcon ، Triptron و ربات های کابلی هستند.
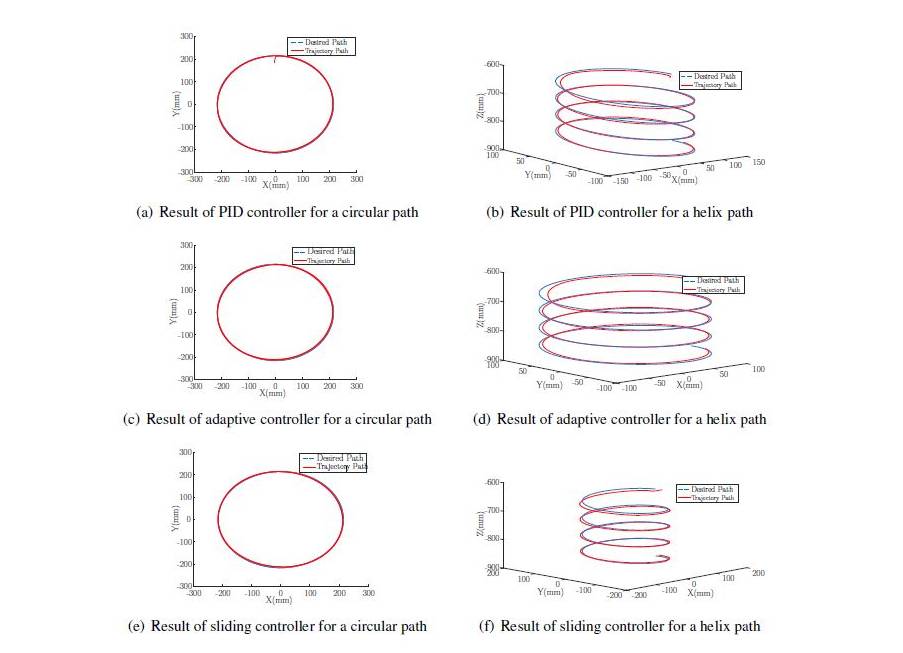
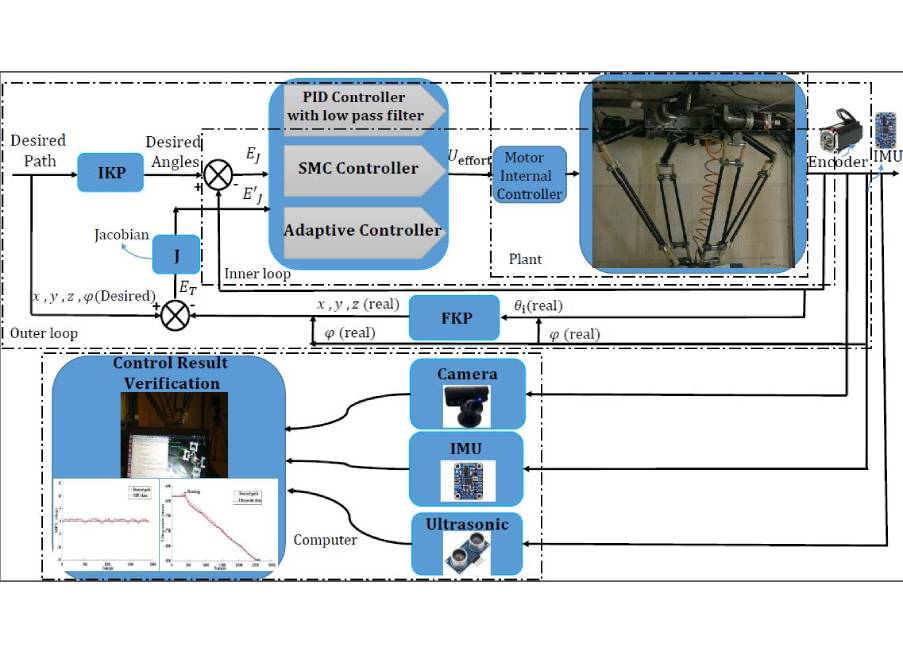
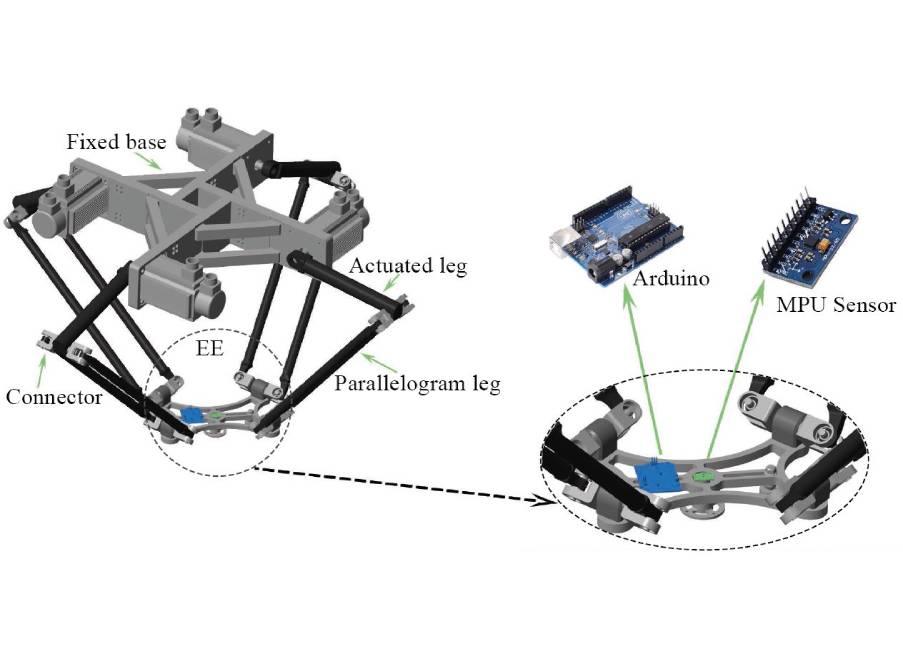
این پروژه به طور عملی کنترل ردیابی مسیر یک ربات موازی 4 درجه آزادی دلتا با شاخه های یکسان را با استفاده از سه روش کنترل کننده، یعنی PID، کنترل تطبیقی و کنترل مد لغزشی بررسی می کند. به عنوان اولین گام، نسخه اولیه و نهایی ربات بر اساس نیازهای موجود، اضافه شدن گیربکس به دلیل گشتاور کم موتورهای نسخه اولیه و قطعه مکانیکی تبدیل فلنج برای اتصال گیربکس به پایه ربات مورد بحث قرار گرفت. به عنوان گام دوم، برای دستیابی به هدف کنترل، راه حل تحلیلی معادلات سینماتیک مستقیم و معکوس و ماتریس ژاکوبین ربات بررسی شده است. برای حل مسئله سینماتیکی ربات 4 درجه آزادی دلتای تحت مطالعه، یک سنسور IMU به مجری نهایی متصل شده است که درجه آزادی چرخشی را محاسبه می نماید و با استفاده از داده های آن به جای حل یک سیستم پیچیده با چند معادله و چند مجهول، معادلات چند جمله ای در این پروژه به یک راه حل ساده منجر می گردد. پس از آن، محاسبات ریاضی سه روش کنترل کننده فوق الذکر با جزئیات ارائه شده است. در ادامه، با استفاده از Simscape Multibody، یک شبیه سازی از ربات فوق انجام می گردد، که با استفاده از آن صحت سنجی معادلات سینماتیکی بدست آمده امکان پذیر می گردد. لازم به ذکر است از آنجا که ربات تحت مطالعه بیشینه مقید است، شبیه سازی در Simscape Multibody کار بسیار پیچیده ای می باشد و به برخی تغییرات آرایش سینماتیکی در طراحی وارد شده به نرم افزار نیاز دارد. پس از آن، کنترل کننده های فوق بصورت عملی اجرا می شوند. سپس، با استفاده از شاخص ردیابی معرفی شده و شاخص خطای none dimensional بر روی تمام کنترل کننده های پیاده سازی شده، نشان داده می شود که کنترل کننده مد لغزشی، عملکرد بهتری را در مقایسه با سایر کنترل کننده ها نشان می دهد. با توجه به مقدار شاخص خطای ردیابی، این مقدار برای کنترل کننده مد لغزشی 7.2967 میلی متر کمتر از کنترل کننده PID در مسیر مارپیچ است.
نوآوری اصلی این پروژه را می توان اجرای عملی کنترل حلقه بسته ربات موازی 4 درجه آزادی دلتا مبتنی بر کنترل کننده مد لغزشی (SMC) و کنترل کننده تطبیقی در نظر گرفت به طوری که مسیرهای مورد نظر را با سرعت و دقت بالا طی کند. نتایج نشان داده اند که کنترل کننده های اشاره شده در بالا برای مسیرهای پیچیده کارآمد هستند و در برابر عدم قطعیت ها و اغتشاشات مقاوم هستند. علاوه بر این، برای رسیدن به نوآوری اصلی، از یک روش تحلیلی یا هندسی برای محاسبه موقعیت مجری نهایی در مقایسه با سایر روش ها که عددی هستند، استفاده شده است. همچنین، ربات موازی 4 درجه آزادی دلتا در محیط Simscape Multibody شبیه سازی شده است، که یک کار پیچیده است. از طریق شبیه سازی، نشان داده شده است که الگوریتم های کنترلی استفاده شده در این پروژه در حضور نویز و اغتشاشات نتایج خوبی دارند.
توضیحات
این پروژه به طور عملی کنترل ردیابی مسیر یک ربات موازی 4 درجه آزادی دلتا با شاخه های یکسان را با استفاده از سه روش کنترل کننده، یعنی PID، کنترل تطبیقی و کنترل مد لغزشی بررسی می کند. به عنوان اولین گام، نسخه اولیه و نهایی ربات بر اساس نیازهای موجود، اضافه شدن گیربکس به دلیل گشتاور کم موتورهای نسخه اولیه و قطعه مکانیکی تبدیل فلنج برای اتصال گیربکس به پایه ربات مورد بحث قرار گرفت. به عنوان گام دوم، برای دستیابی به هدف کنترل، راه حل تحلیلی معادلات سینماتیک مستقیم و معکوس و ماتریس ژاکوبین ربات بررسی شده است. برای حل مسئله سینماتیکی ربات 4 درجه آزادی دلتای تحت مطالعه، یک سنسور IMU به مجری نهایی متصل شده است که درجه آزادی چرخشی را محاسبه می نماید و با استفاده از داده های آن به جای حل یک سیستم پیچیده با چند معادله و چند مجهول، معادلات چند جمله ای در این پروژه به یک راه حل ساده منجر می گردد. پس از آن، محاسبات ریاضی سه روش کنترل کننده فوق الذکر با جزئیات ارائه شده است. در ادامه، با استفاده از Simscape Multibody، یک شبیه سازی از ربات فوق انجام می گردد، که با استفاده از آن صحت سنجی معادلات سینماتیکی بدست آمده امکان پذیر می گردد. لازم به ذکر است از آنجا که ربات تحت مطالعه بیشینه مقید است، شبیه سازی در Simscape Multibody کار بسیار پیچیده ای می باشد و به برخی تغییرات آرایش سینماتیکی در طراحی وارد شده به نرم افزار نیاز دارد. پس از آن، کنترل کننده های فوق بصورت عملی اجرا می شوند. سپس، با استفاده از شاخص ردیابی معرفی شده و شاخص خطای none dimensional بر روی تمام کنترل کننده های پیاده سازی شده، نشان داده می شود که کنترل کننده مد لغزشی، عملکرد بهتری را در مقایسه با سایر کنترل کننده ها نشان می دهد. با توجه به مقدار شاخص خطای ردیابی، این مقدار برای کنترل کننده مد لغزشی 7.2967 میلی متر کمتر از کنترل کننده PID در مسیر مارپیچ است.
نوآوری اصلی این پروژه را می توان اجرای عملی کنترل حلقه بسته ربات موازی 4 درجه آزادی دلتا مبتنی بر کنترل کننده مد لغزشی (SMC) و کنترل کننده تطبیقی در نظر گرفت به طوری که مسیرهای مورد نظر را با سرعت و دقت بالا طی کند. نتایج نشان داده اند که کنترل کننده های اشاره شده در بالا برای مسیرهای پیچیده کارآمد هستند و در برابر عدم قطعیت ها و اغتشاشات مقاوم هستند. علاوه بر این، برای رسیدن به نوآوری اصلی، از یک روش تحلیلی یا هندسی برای محاسبه موقعیت مجری نهایی در مقایسه با سایر روش ها که عددی هستند، استفاده شده است. همچنین، ربات موازی 4 درجه آزادی دلتا در محیط Simscape Multibody شبیه سازی شده است، که یک کار پیچیده است. از طریق شبیه سازی، نشان داده شده است که الگوریتم های کنترلی استفاده شده در این پروژه در حضور نویز و اغتشاشات نتایج خوبی دارند.
پژوهشگران
مهدی آزمون، علی روحاللهی، میلاد شاهامیری
کلمات کلیدی
ربات موازی، دلتا، سینماتیک، کنترل، کنترل مود لغزشی