سال ساخت: —
اسم ربات: —
سازندگان: —
کاربرد ربات: —
توضیحات
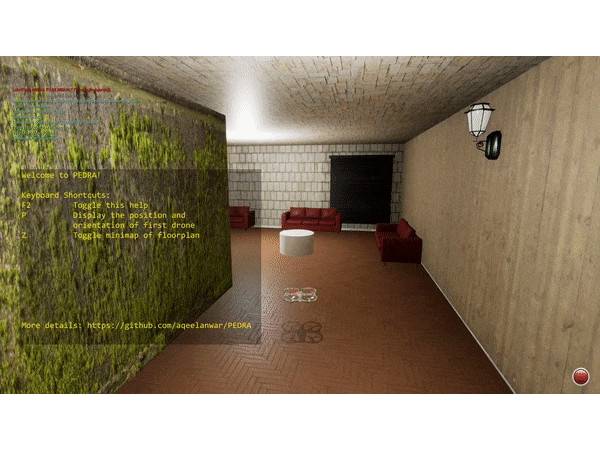
در این پروژه کوادکوپتر باید بتواند تنها به کمک یک دوربین عمل نقشه برداری از محیط را انجام دهد و در محیط حرکت کند. در واقع در اینجا از یادگیری عمیق و شبکه های کانولوشنی و مولد متخاصمی استفاده می شود و ربات با استفاده از یک دوربین در محیط حرکت می کند. تمامی این موارد با استفاده از airsim شبیه سازی شده است و در نهایت تلاش بر آن است که در ROS و Gazebo نیز پیاده سازی انجام پذیرد.
اگر نتایج موفقیت آمیز باشد ربات نهایی می تواند با هزینه ای بسیار کمتر تولید گردد و عمر پرواز ربات پرنده نیز به دلیل عدم استفاده از سنسورهایی چون کینکت و لیزراسکنر طولانی تر می شود.
توضیحات
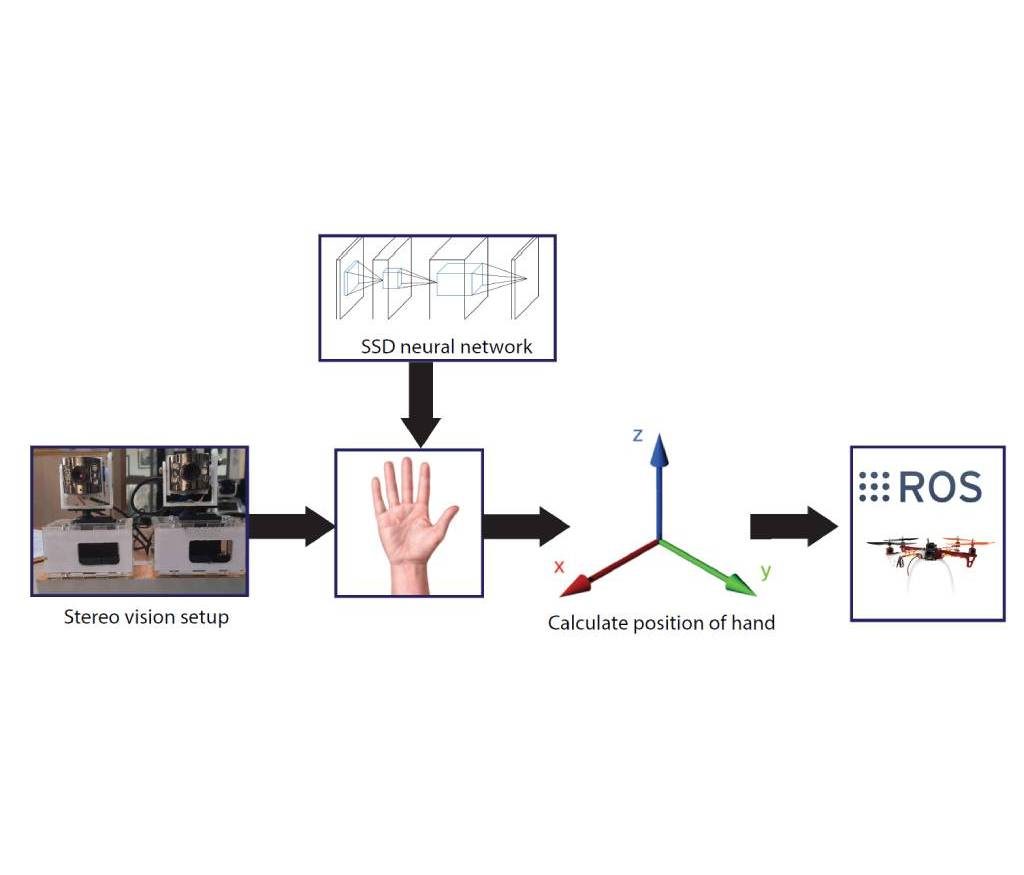
در پروژه جهت یابی خودکار ربات پرنده به کمک یادگیری عمیق سعی شده است تا یک ربات پرنده تنها بتواند به کمک یک دوربین در محیط حرکت کند. در گذشته حرکت در محیط عمدتا به کمک پیدا کردن تصویر عمق و استفاده از آن برای جهت یابی انجام گردیده است و در این پروژه تلاش شده تا به کمک شبکه های کانولوشنی و شبکه های مولد متخامصی این جهت یابی خودکار تنها به کمک یک تصویر از دوربین ربات انجام گردد. با این کار هزینه نهایی ساخت ربات پرنده نیز کاهش پیدا میکند و علاوه بر آن ربات نیز سبک تر می شود و می تواند در مدت زمان بالاتری در محیط پرواز کند.
پژوهشگران
حامد قاسمی
کلمات کلیدی
ربات پرنده، کوادروتور، یادگیری عمیق، جهتیابی خودکار، CNN، GAN