سال ساخت: —
اسم ربات: —
سازندگان: —
کاربرد ربات: —
توضیحات
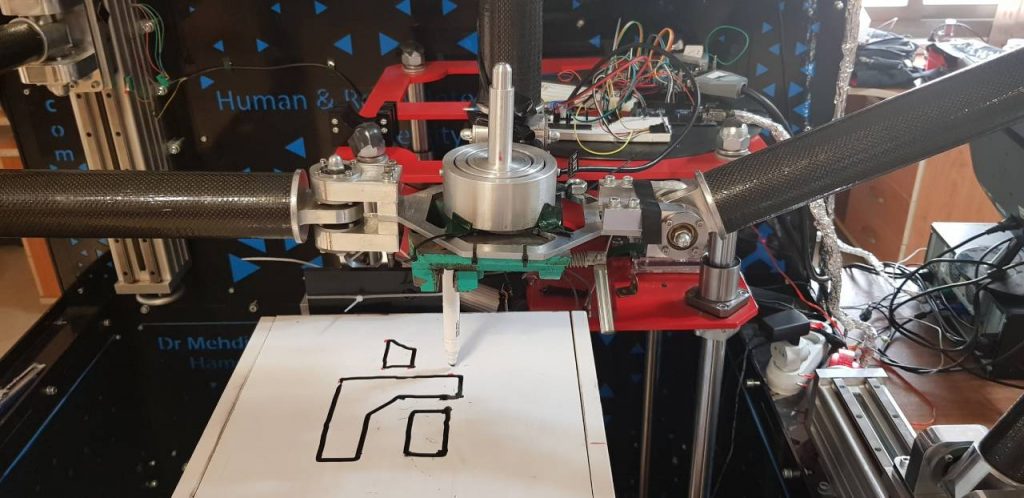
رباتهای با ساختار موازی، به دلیل داشتن مزیتهایی همچون نسبت بالایی از بار اعمالی به وزن ربات، دقت بالا و همچنین سختی زیاد نسبت به همتاهای سری خود در صنایع امروزی مورد توجه بیشتری قرار گرفتهاند. یکی از مهمترین مسائلی که در رباتهای موازی مطرح میشود، خطای حاصل از نرمیِ ساختارِ ربات میباشد. در مکانیزمهای موازی مقدار این خطا به دلیل ساختارِ خاصِ مکانیکیِ آن از مقدار پایینی برخوردار است. بنابراین، با توجه به موارد ذکرشده، از رباتهای موازی در کاربردهای صنعتیِ دقیق نظیر پرینترهای سهبعدی و ماشینهای کنترل عددی استفاده میشود. در این پژوهش، طراحی و ساخت یک ربات موازی سه درجه آزادیِ مستقل خطی با استفاده از بازوهای با جنس فیبرکربن انجام میشود. بدین منظور طول بازوهای هر شاخه از ربات و همچنین فواصل عملگرهای خطی نسبت به هم، طوری تعیین میگردند که علاوه بر دستیابی به فضای کاری مورد نظر، این فضا عاری از برخورد و ربات دور از تکنیگی باشد. همچنین، در طراحی این ربات، سختی آن نیز مورد بررسی و بهینهسازی قرار میگیرد. در مدلسازیِ سختی این ربات، از میان روشهای موجود، از روش آنالیز المان محدود که از دقت بالایی برخوردار است، استفاده میشود. از آنجایی که ربات مورد نظر مستقل خطی میباشد، نیروی خارجی وارده بر مجری نهایی در هر راستا به طور مستقیم به شاخهی مربوطه اعمال میگردد. بنابراین روند بهینهسازی روی یک شاخه از ربات به صورت جداگانه انجام میشود. با توجه به مدلسازی سختی ربات، بهینهسازی بر روی پارامترهایی همچون تعداد لایهچینیهای فیبرکربن و قطر بازوهای هر شاخه انجام میگردد تا به ازای بار اعمالی مورد نظر به مجری نهایی، کمترین میزان خیز را داشته باشد. بدین منظور میزان ضریب همبستگیِ پارامترهای ذکرشده به روش پیرسون بررسی میشود و سپس با استفاده از روششناسیِ سطح پاسخ، پارامترهای طراحی بهینه میشوند. با توجه به پارامترهای طراحیِ به دست آمده در مرحلهی قبل، در نهایت، ربات سه درجه آزادی مستقل خطی ساخته میشود. در انتهای این پژوهش، به منظور راستی آزمایی نتایج بدست آمده از مدلسازیِ سختی ربات، دستگاهی جهت اندازهگیری سختی ربات طراحی و ساخته میشود. این دستگاه قابلیت اعمال نیرو و گشتاور به مجری نهایی را دارا میباشد. همچنین با ابزارهای اندازهگیریِ تعبیه شده بر روی این دستگاه، میزان جابهجایی و جهتگیری اندازهگیری میشود. برای ربات جدید باز طراحی شده، نتایج به دست آمده از آزمایشهای عملی، مورد بررسی و مقایسه با نتایج مدلسازی قرار گرفتند که از مطابقت بالایی برخوردار میباشند. همچنین، دقت برگشت پذیری این ربات در حدود میکرومتر حاصل شده است.
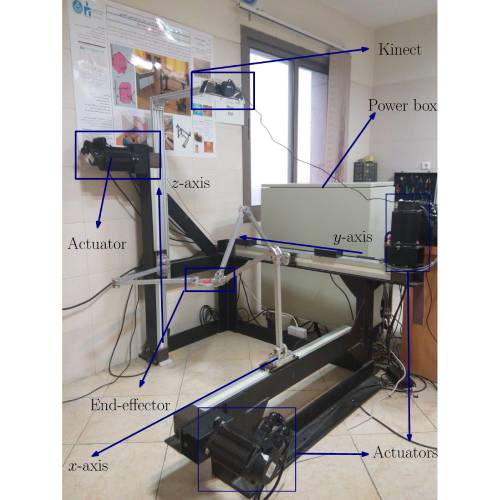
<strong>توضیحات</strong><p>فعالیت های محمد در آزمایشگاه تعامل انسان و ربات، به دو موضوع شناسایی و کنترل دینامیکی ربات موازی 3 درجه آزادی کارتزین (تریپترون) و طراحی ماژول تعامل انسان و ربات مناسب کاربرد صنعتی و استفاده از آن در ربات مذکور میپردازد.
در مبحث شناسایی با استفاده از دو روش شناسایی مستقیم و غیر مستقیم سعی شده است تا برای ربات تریپترون که یک ربات بیشینه مقید است، مدلی بر پایه دادههای نمونه برداری شده از عملکرد ربات ارائه گردد. در ابتدا شناسایی بر روی مرتبه سیستم و پاسخ پله ربات انجام پذیرفت. سپس، در روش شناسایی مستقیم که بر مبنای شناسایی داده محور (جعبه سیاه) صورت گرفته است با پیشنهاد یک مجموعه 106 رگرسوری متشکل از موقعیت، سرعت و شتاب مجری نهایی و همچنین گشتاور اعمالی موتورها، مدلی برای توصیف عملکرد ربات پیشنهاد گردید.
از سوی دیگر، با توجه به دادههای نمونهبرداری شده از عملکرد ربات و با استفاده از مدل نظری ربات و همچنین اصطکاک ماژول خطی، شناسایی غیر مستقیم بر مبنای شناسایی مدل محور (جعبه سفید) صورت گرفت. در این راستا، از مدل دینامیک معکوس سادهسازی شده ربات استفاده شد. همچنین برای اصطکاک ماژول خطی از دو مدل اصطکاک استفاده گردید؛ مدل متداول اصطکاک که متشکل از المانهای مرتبط با اصطکاک خشک و لزجت است و مدل شناسایی شده از اصطکاک حرکتی ماژول خطی که مبتنی بر سری فوریه میباشد.
در مبحث کنترل دینامیکی ر وشهای مختلف کنترلی بر روی ربات اعمال گردید. در این راستا، ابتدا با کنترلکننده های PID و مد لغزشی بر مبنای مدل پاسخ پله سعی شد تا به کنترلی مناسب دست یافته شود.
پس با استفاده از مدل سری فوریه اصطکاک ماژول خطی، یک واحد کنترلکننده پیشخور به سیستم کنترلی اضافه گردید.
در آخر نیز با استفاده از پیشخور مبتنی بر مدل مبتنی بر دینامیک معکوس و سری فوریه اصطکاک حرکتی ماژول خطی، کنترلی با استفاده از کنترلکننده PID بر روی ربات اعمال گردید.
در مبحث تعامل انسان و ربات به طراحی، ساخت و کالیبراسیون یک ماژول تعامل انسان و ربات برای ربات پرداخته شد. پس از آن، با استفاده از این ماژول دو روش کنترل حلقهباز موقعیت و سرعت بر روی ربات اعمال گردید، که با توجه به نتایج عملی، مشخص گردید که کنترل حلقهباز سرعت، کارآمدتر است.</p>
<strong>پژوهشگران</strong><p>محمد شریفزاده، محسن حیدرزاده</p>
<strong>کلمات کلیدی</strong><p>ربات موازی، شناسایی سیستم، حسگر نیرو/گشتاور، ربات تریپترون، مدلسازی دینامیکی</p>
توضیحات
رباتهای با ساختار موازی، به دلیل داشتن مزیتهایی همچون نسبت بالایی از بار اعمالی به وزن ربات، دقت بالا و همچنین سختی زیاد نسبت به همتاهای سری خود در صنایع امروزی مورد توجه بیشتری قرار گرفتهاند. یکی از مهمترین مسائلی که در رباتهای موازی مطرح میشود، خطای حاصل از نرمیِ ساختارِ ربات میباشد. در مکانیزمهای موازی مقدار این خطا به دلیل ساختارِ خاصِ مکانیکیِ آن از مقدار پایینی برخوردار است. بنابراین، با توجه به موارد ذکرشده، از رباتهای موازی در کاربردهای صنعتیِ دقیق نظیر پرینترهای سهبعدی و ماشینهای کنترل عددی استفاده میشود. در این پژوهش، طراحی و ساخت یک ربات موازی سه درجه آزادیِ مستقل خطی با استفاده از بازوهای با جنس فیبرکربن انجام میشود. بدین منظور طول بازوهای هر شاخه از ربات و همچنین فواصل عملگرهای خطی نسبت به هم، طوری تعیین میگردند که علاوه بر دستیابی به فضای کاری مورد نظر، این فضا عاری از برخورد و ربات دور از تکنیگی باشد. همچنین، در طراحی این ربات، سختی آن نیز مورد بررسی و بهینهسازی قرار میگیرد. در مدلسازیِ سختی این ربات، از میان روشهای موجود، از روش آنالیز المان محدود که از دقت بالایی برخوردار است، استفاده میشود. از آنجایی که ربات مورد نظر مستقل خطی میباشد، نیروی خارجی وارده بر مجری نهایی در هر راستا به طور مستقیم به شاخهی مربوطه اعمال میگردد. بنابراین روند بهینهسازی روی یک شاخه از ربات به صورت جداگانه انجام میشود. با توجه به مدلسازی سختی ربات، بهینهسازی بر روی پارامترهایی همچون تعداد لایهچینیهای فیبرکربن و قطر بازوهای هر شاخه انجام میگردد تا به ازای بار اعمالی مورد نظر به مجری نهایی، کمترین میزان خیز را داشته باشد. بدین منظور میزان ضریب همبستگیِ پارامترهای ذکرشده به روش پیرسون بررسی میشود و سپس با استفاده از روششناسیِ سطح پاسخ، پارامترهای طراحی بهینه میشوند. با توجه به پارامترهای طراحیِ به دست آمده در مرحلهی قبل، در نهایت، ربات سه درجه آزادی مستقل خطی ساخته میشود. در انتهای این پژوهش، به منظور راستی آزمایی نتایج بدست آمده از مدلسازیِ سختی ربات، دستگاهی جهت اندازهگیری سختی ربات طراحی و ساخته میشود. این دستگاه قابلیت اعمال نیرو و گشتاور به مجری نهایی را دارا میباشد. همچنین با ابزارهای اندازهگیریِ تعبیه شده بر روی این دستگاه، میزان جابهجایی و جهتگیری اندازهگیری میشود. برای ربات جدید باز طراحی شده، نتایج به دست آمده از آزمایشهای عملی، مورد بررسی و مقایسه با نتایج مدلسازی قرار گرفتند که از مطابقت بالایی برخوردار میباشند. همچنین، دقت برگشت پذیری این ربات در حدود میکرومتر حاصل شده است.
پژوهشگران
حامد چلنگری
کلمات کلیدی
ربات موازی، درجه آزادی محدود، مدلسازی سختی، روش آنالیز المان محدود، دستگاه اندازهگیری سختی
توضیحات
پروژه ی انجام شده در قالب پایان نامه به دو موضوع مدلسازی، شناسایی و کنترل دینامیکی یک ربات موازی مستقل خطی سه درجه آزادی کارترینی (تریپترون) و طراحی و ساخت حسگر نیرو/گشتاور سه محوره باهدف تعامل بین انسان و ربات پرداخته است. در مبحث مدلسازی ربات، با توجه به ساختار ربات، برای مفاصل خطی به کار گرفتهشده در ربات یک مدل خطی در نظر گرفته شد. بهمنظور در نظرگیری اصطکاک در این سیستم، دو مدل غیرخطی شامل اصطکاک ایستایی، لزجت و اصطکاک کولمبی و در حضور اثر استری بک، بررسی و بهعنوان اغتشاش ورودی در سیستم در نظر گرفتهشد. با انتخاب یکی از مدلهای اصطکاک با توجه به تطابق بیشتر نتایج شناسایی با دادههای عملی، مدل دینامیک مفاصل خطی ربات بهدستآمد. بهمنظور مدلسازی انعطافپذیری در مجری نهایی ربات، یک مدل شامل فنر و میرا کننده بدین منظور در نظر گرفتهشد و درنتیجه مدل دینامیکی کل ربات با در نظرگیری این مدل و دینامیک مفاصل کشویی ربات حاصلشد. در ادامه بهوسیلهی دادههای عملی جمعآوریشده از ربات، پارامترهای دینامیکی مدل، شناساییشده و بر اساس آنها یک کنترل مد لغزشی انتگرالی با کمترین نوسان بهمنظور تنظیم و ردیابی مجری نهایی ربات و کاهش نوسانات آن طراحی و پیادهسازی شده است. همچنین یک کنترل غیرخطی مبتنی بر فیدبک خطی ساز برای ردیابی و تنظیم طراحی و پیادهسازی شده است.
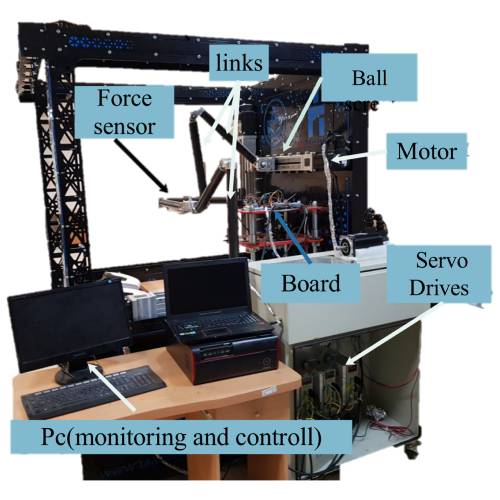
در بخش طراحی و ساخت حسگر نیرو/گشتاور سه محوره به طراحی و ساخت سه نسل از حسگرهای نیروی مبتنی بر اثر هال با ساختارهای متفاوت پرداخته شده است که نسل سوم آن ها توانایی سنجش نیرو در سه محور کارترینی را با دقت 0.005 نیوتن و تا محدوده ی 5 نیوتن را دارا است. ازجمله مزایای این حسگر میتوان به حساسیت بالا، خطی بودن، هزینهی ساخت کم و نسبت سیگنال به نویز مناسب را اشاره کرد. در ادامه با کالیبراسیون نسل سوم این حسگرها یک کنترل حلقه بستهی نیرو بهمنظور کنترل نیروی اعمالشده در مجری نهایی ربات به محیط خود، ارائه و پیادهسازی شده است.
پژوهشگران
آرمان بیرانوند
کلمات کلیدی
ربات موازی، شناسایی سیستم، حسگر نیرو/گشتاور، الگوریتم بهینه سازی، مسیریابی ربات، ربات تریپترون، مدلسازی دینامیکی، مدلسازی سینماتیکی