


سال ساخت: —
اسم ربات: —
سازندگان: —
کاربرد ربات: —
توضیحات
لورم ایپسوم متن ساختگی با تولید سادگی نامفهوم از صنعت چاپ، و با استفاده از طراحان گرافیک است، چاپگرها و متون بلکه روزنامه و مجله در ستون و سطرآنچنان که لازم است، و برای شرایط فعلی تکنولوژی مورد نیاز، و کاربردهای متنوع با هدف بهبود ابزارهای کاربردی می باشد، کتابهای زیادی در شصت و سه درصد گذشته حال و آینده، شناخت فراوان جامعه و متخصصان را می طلبد، تا با نرم افزارها شناخت بیشتری را برای طراحان رایانه ای علی الخصوص طراحان خلاقی، و فرهنگ پیشرو در زبان فارسی ایجاد کرد، در این صورت می توان امید داشت که تمام و دشواری موجود در ارائه راهکارها، و شرایط سخت تایپ به پایان رسد و زمان مورد نیاز شامل حروفچینی دستاوردهای اصلی، و جوابگوی سوالات پیوسته اهل دنیای موجود طراحی اساسا مورد استفاده قرار گیرد.لورم ایپسوم متن ساختگی با تولید سادگی نامفهوم از صنعت چاپ، و با استفاده از طراحان گرافیک است، چاپگرها و متون بلکه روزنامه و مجله در ستون و سطرآنچنان که لازم است، و برای شرایط فعلی تکنولوژی مورد نیاز، و کاربردهای متنوع با هدف بهبود ابزارهای کاربردی می باشد، کتابهای زیادی در شصت و سه درصد گذشته حال و آینده، شناخت فراوان جامعه و متخصصان را می طلبد، تا با نرم افزارها شناخت بیشتری را برای طراحان رایانه ای علی الخصوص طراحان خلاقی، و فرهنگ پیشرو در زبان فارسی ایجاد کرد، در این صورت می توان امید داشت که تمام و دشواری موجود در ارائه راهکارها، و شرایط سخت تایپ به پایان رسد و زمان مورد نیاز شامل حروفچینی دستاوردهای اصلی، و جوابگوی سوالات پیوسته اهل دنیای موجود طراحی اساسا مورد استفاده قرار گیرد.
توضیحات
پیشرفت تکنولوژی در زمینه های مختلف باعث شده ربات ها در زندگی روزمره انسان ها وارد شوند که از مزایای آن ها می توان به افزایش بهره، افزایش تولید، بهبودکیفیت کار، افزایش دقت، جلوگیری از اتلاف نیروی انسانی، افزایش سرعت، کاهش هزینه، کاهش ضایعات، چند منظوره بودن، هوشمند بودن و عدم خستگی اشاره کرد.موبایل ربات ها نیز در چند دهه اخير توجه بسياری از محققان را به سوی خود معطوف کرده اند. کاربردهای موبایل ربات ها بسيار زياد و متنوع است؛ جابجايی اشيا در ساختمان ها، منازل، هواپيماها و کتابخانه ها، ربات های خدمتکار و…. اگرچه نياز برای اين کاربردها بسيار زياد است ولی محدوديت های ربات های موجود، در مواجهه با دنيای واقعی مانع کاربرد عملی آن در مقياس وسيع شده است؛ تفاوت قابل توجه ميان رفتار ربات ها با انسان ها باعث ايجاد مقاومت زيادی در برابر استفاده از ربات ها در کاربردهای مختلف گرديده است. بنابراين تلاش در جهت هوشمندسازی بيشتر ربات ها و افزودن خودمختاری به آنها برای تصميم گيری بهتر در مواجهه با شرايط و تغييرات محيط، گام مهمی در کاهش محدوديت های موجود در به کارگيری واقعی ربات ها و خارج شدن آنها از محيط های تحقيقاتی به سمت کاربردهای عملی تر محسوب می شود. در همين راستا تحقيق بر روی مسئله موقعیت یابی و مسيريابی از مهمترين چالش های موجود در زمينه موبایل ربات ها هستند.
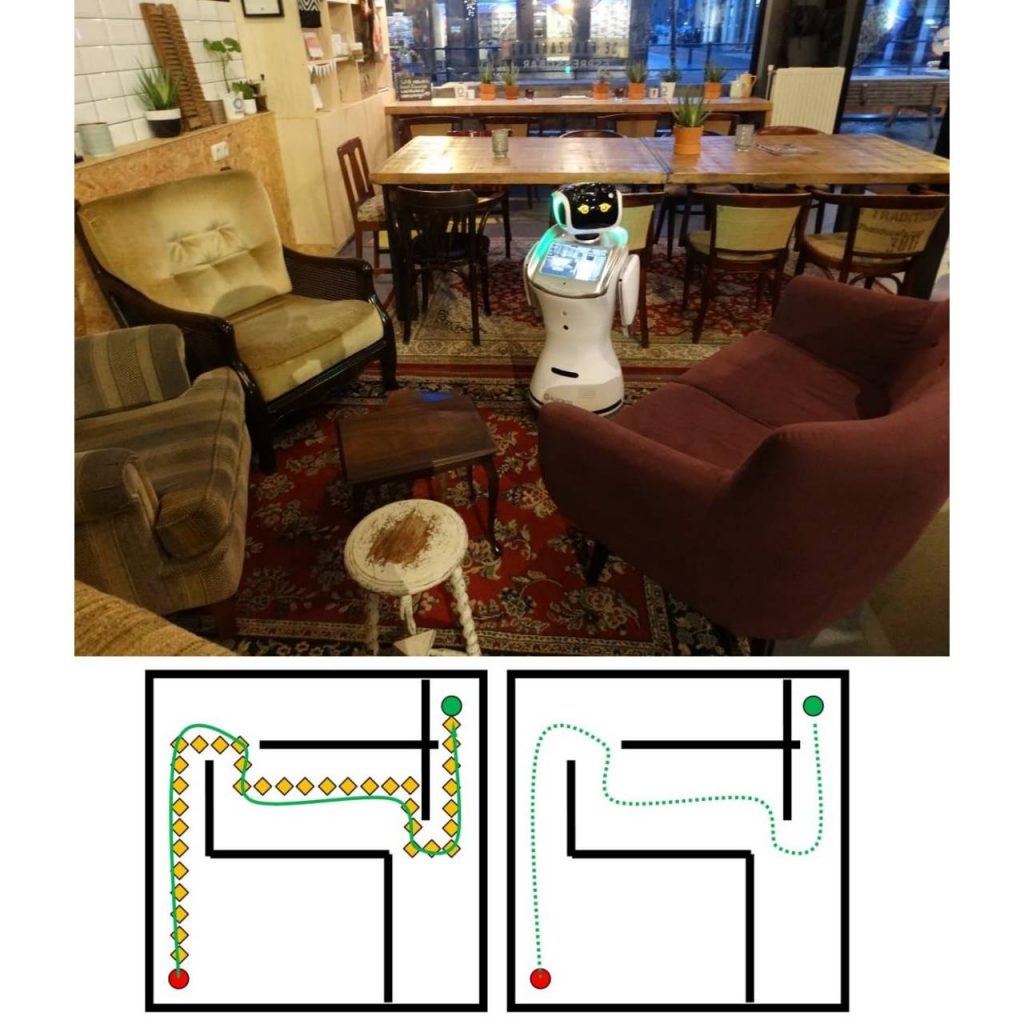
موقعیت یابی عبارت است از توانايی تعیین موقعیت دقیق ربات در محيطی که در آن قرار گرفته شده و مسيريابی نيز عبارت است از عبور ربات از يک مسير در يک فضای کاری که به وسيله آن ربات قادر خواهد بود تا بدون برخورد با مانع های پيشرو، از نقطه مبدا به نقطه مقصد برسد.
با وجود برتری متدهای مبتنی بر الگوريتم های هوشمند در مقايسه با ساير متدها برای مسيريابی ربات های متحرک، نياز و لزوم بهبود عملکرد و افزايش دقت آنها همواره مورد تاکيد بوده و موجب شده است تا تلاش ها در اين جهت همچنان ادامه داشته باشد.
هدف اصلی در گام اول طراحی روشی برای موقعیت یابی موبایل ربات ها بااستفاده از یک دوربین بوده که موفقیت هایی در این زمینه حاصل شده، که در آن ربات فقط با استفاده از یک دوربین RGB بتواند موقعیت خود را در محیط مشخص کند. درگام بعدی نیز به مسیریابی موبایل ربات ها در محیط های استاتیک پرداخته می شود که در این زمینه تاکنون روشی برای global path planning بر مبنای شبکه های عصبی بازگشتی پیاده سازی شده که این روش با دانستن موقعیت موانع در محیط می تواند بین هر دو نقطه مطلوب بعنوان نقطه شروع و پایان، مسیر بهینه عاری از موانع را به دست آورد. در ادامه قصد بر این است پس از بهینه سازی روش موردنظر، به تعمیم این روش برای موانع داینامیک پرداخته شود. درنهایت الگوریتم های طراحی شده بر روی ربات sanbot پیاده سازی شود.
پژوهشگران
شیرین چهلگامی
کلمات کلیدی
ربات اجتماعی Sanbot، پردازش تصویر، یادگیری عمیق، مسیریابی ربات، شبکههای عصبی کانولوشن، شبکههای بازگشتی

توضیحات
بر اساس عنوان پروژه که کنترل از راه دور و مسیر یابی ربات اجتماعی سنبات در محیط های داخلی با در نظر گرفتن ورود و خروج از در بر پایه الگوریتم های هوشمند مبتنی بر داده های انسانی می باشد در این جا به صورت کلی دو گام اساسی وجود دارد. گام اول تشخیص درب و بررسی روش های مناسب جهت عبور از آن می باشد که این روش ها مبتنی بر روش های یادگیری عمیق و هم چنین یادگیری تقویتی با استفاده از داده های انسانی می باشد. گام دوم کنترل از راه دور و مسیر یابی ربات سنبات در محیط های داخلی با استفاده از روش های یادگیری عمیق و یادگیری تقویتی می باشد . در واقع در ربات های telepresence، ربات از راه دور کنترل شده و با توجه به اهداف کاربر، می تواند از محیط مد نظر بازدید نماید و هم چنین قابلیت هایی هم چون برگزاری کنفرانس از راه دور و بازدید از ربات های محیط آزمایشگاه را فراهم می کند. در این جا ربات در ابتدا محیط را شناسایی نموده و پس از شناسایی محیط و اشیای داخل آن، با توجه به هدف دریافت شده از طرف کاربر شروع به مسیر یابی جهت رسیدن به مقصد می نماید به گونه ای که به هیچ گونه مانعی برخورد نکند. در واقع به صورت کلی ربات های telepresence در موارد متفاوتی هم چون ادارات مورد استفاده قرار می گیرند اما آن چه که به آن توجه کمتری شده است و هم چنین دلیل وجود گام اول در این بخش این است که یکی از موانع موجود در مسیر ربات های telepresence، درب ها می باشند و لازم است ربات تشخیص دهد که مانعی که بر سر راه آن قرار دارد درب، ربات و یا یک انسان می باشد و چنان چه مانع را درب تشخیص دهد ایا امکان عبور از آن را دارد و یا خیر، تا در صورت مثبت بودن پاسخ، بهترین مسیر برای عبور از درب بدون برخورد با آن را پیدا نماید و چنان چه زاویه ی درب به اندازه ی کافی باز نباشد بتواند جهت عبور از درب، درخواست کمک نماید. ربات های telepresence امروزه توانسته اند کمک شایانی در جهت خدمات رسانی از راه دور نمایند تا بتوان با صرفه جویی در زمان، به اهداف خود از راه دور رسید.
پژوهشگران
شایان سمیعی
کلمات کلیدی
ربات اجتماعی Sanbot، پردازش تصویر، یادگیری عمیق، مسیریابی ربات، شبکههای عصبی کانولوشن، یادگیری تقویتی
<strong>توضیحات</strong><p>موقعیت یابی و مسیر یابی ربات ها یک مسئله بسیار مهم در حوزه رباتیک است و تقریبا برای ربات های سرویس دهنده امری بسیار ضروری است. ربات سنبات یک ربات قابل برنامه ریزی (محدود) است که با یک ساختار اجتماعی، شامل تعدادی حسگر و نحوه حرکت آن توسط چرخ های موجود در قسمت زیرین ربات می باشد. این ربات به صورت پیش فرض امکان مسیر یابی و حرکت برنامه ریزی شده در محیط را ندارد و همچنین پیاده سازی روش های رایج با توجه به محدودیت های موجود در ربات به صورت عادی عملا امکان پذیر نبوده و نیاز به روش های پیچیده تر و همچنین استفاده از روش های مختلف در کنار یکدیگر است. هدف مورد نظر پروژه فراهم کردن بستر و ابزاری جهت موقعیت یابی و مسیر یابی ربات در یک است. این اهداف شامل نقشه برداری و موقعیت یابی محلی در نقشه به صورت همزمان، مسیر یابی بهینه و اجتناب از موانع است که با استفاده از امکانات فعلی ربات باید صورت بگیرد.
با توجه به ساختار ربات و محدودیت های موجود در ربات به طوری که این ربات شامل ویژگی های کلیدی جهت انجام این امر نمی باشد، نیازمند است تا روشی مطرح گردد که این امر قابل انجام پذیری باشد. به علت فقدان اطلاعات و داده های حرکت چرخ های ربات و همچنین عدم وجود حسگر های لازم برای موقعیت سنجی، روش انتخاب شده موقعیت یابی توسط دوربین و حسگر های بصری ربات می باشد. به طوری که با استفاده از دوربین 3 بعدی موجود در ربات، تا حدی انجام این فعالیت امکان پذیر می گردد. همچنین این مسئله قابل ذکر است که داده های بصری دارای حجم بسیار زیاده هستند و رسانه های درنظر گرفته شده در این ربات ظرفیت انتقال این داده ها را در سرعت مطلوب ندارند و این خود یک چالش دیگر است. نو آوری های موجود در این مسئله شامل طرح کردن روش های تخمین و نقشه برداری توسط داده های بصری، روش های طرح شده جهت انتقال داده های حسگر ها به سمت سرور پردازنده، و همچنین کنترل چرخ های ربات که به صورت کامل روش های کنترلی بر روی آن امکان پذیر نیستند. در حال حاظر بسیاری از چالش ها پشت سر گذاشته شده و هم اکنون انتظار می رود تا محدودیت های فعلی موجود در انتقال داده ها برطرف شود تا بتوان عملیات مسیر یابی را بدون مشکل به سرانجام رساند.</p>
<strong>پژوهشگران</strong><p>ابوالفضل جلالی، کسری خلفی</p>
<strong>کلمات کلیدی</strong><p>ربات اجتماعی Sanbot، ربات چرخ دار، کنترل هوشمند، شناسایی سیستم، مسیریابی ربات، یادگیری تقویتی</p>
