سال ساخت: —
اسم ربات: —
سازندگان: —
کاربرد ربات: —
توضیحات
ربات 6 درجه آزادی گاف استوارت از جمله شناخنه شده ترین و قدیمی ترین ربات های موازی می باشد. از کاربردهای این ربات می توان به پلتفرم های متحرک شبیه ساز پرواز، پایه متحرک تلسکوپ های غول پیکر، مکانیزم های اتصال (Docking)، و همچنین در زمینه ی توانبخشی دست و یا پای افراد آسیب دیده اشاره کرد. آزمایشگاه تعامل انسان ربات (تارلب) با استفاده از تکنولوژی های به روز در حوزه ی ربات های موازی موفق به ساخت، مدل سازی، و کنترل ربات نیوماتیکی 6 درجه آزادی موسوم به HexaTaar گردید. گروه طراحی و ساخت آزمایشگاه تارلب، در زمینه ی ساخت این ربات از به روزترین عملگرهای نیوماتیکی استفاده کرده اند. مدل سازی سازی دینامیکی و شناسایی پارامترهای مجهول آن با استفاده از روش های دقیق و بر اساس تست های عملی متنوع و پردازش داده های تست انجام شده است. کنترل دقیق موقعیت این ربات و همچنین دنبال کردن مسیر توسط مجری نهایی این ربات توسط گروه شناسایی و کنترل آزمایشگاه تارلب انجام شده است. بنابراین بر اساس روش های به کارگرفته شده برای کنترل ربات HexaTaar، این ربات و حتی نسخه های کوچک و یا بزرگ شده ی این ربات را قادر می سازد تا به راحتی در کاربردهای ذکر شده به کار گرفته شود. دانشجویان زیادی تحقیقات خود را بر روی ربات HexaTaar به انجام رساندند و مقالاتی را در کنفرانس ها و ژورنال های معتبر به چاپ رساندند.
توضیحات
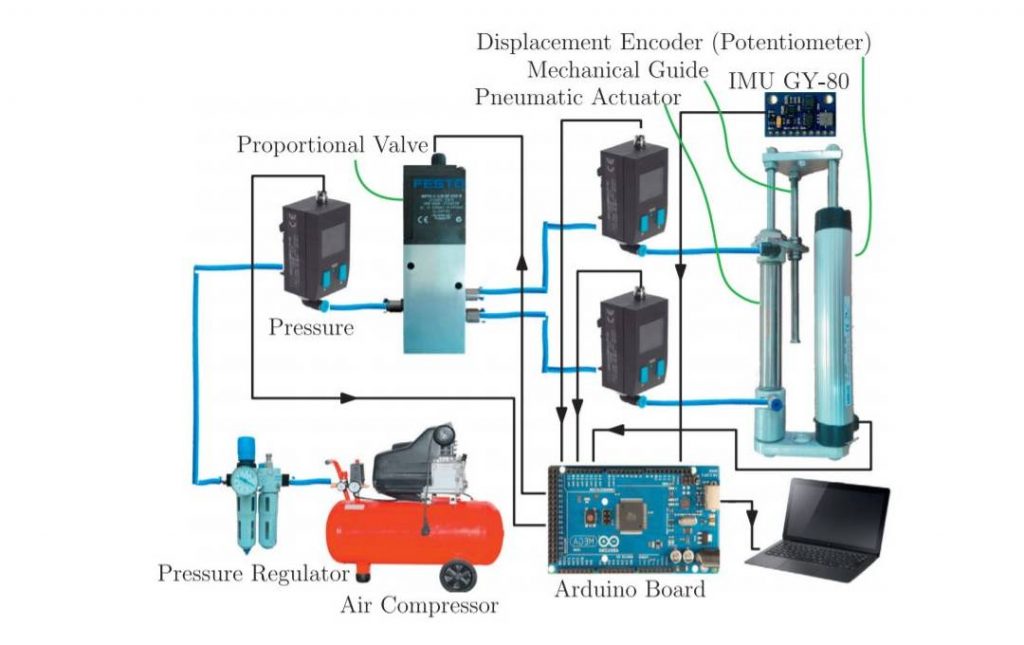
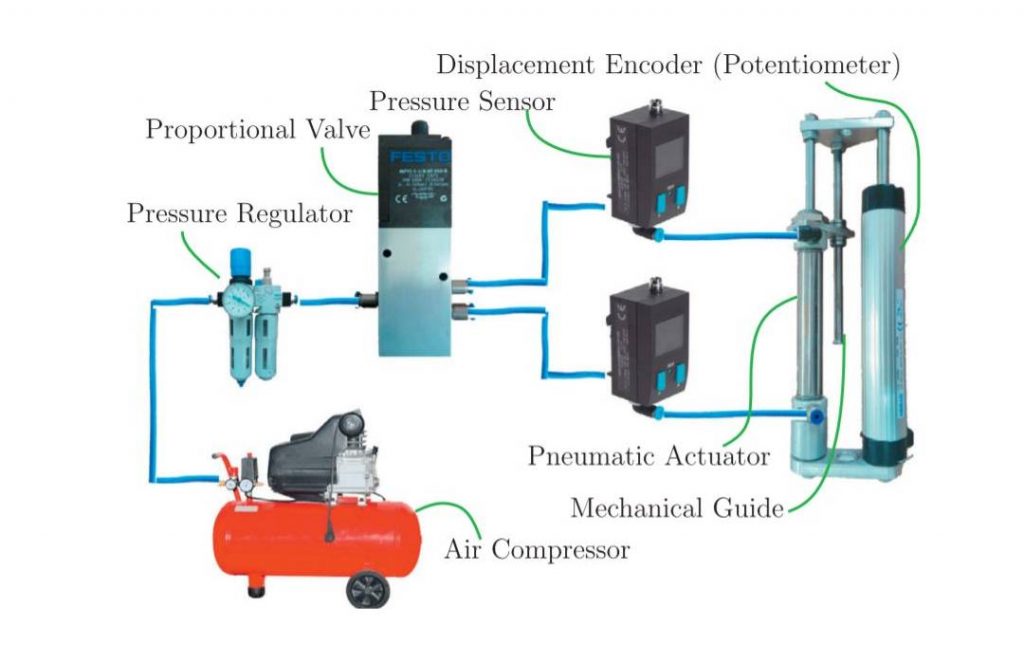
در این مقاله، کنترل موقعیت یک ربات موازی نیوماتیکی شش درجه آزادی گاف-استوارت موسوم به هگزاتار به منظور ردیابی مسیرهای مطلوب مطالعه شده است. در ابتدا، معادلات دینامیکی مربوط به سیستم نیوماتیکی هر شاخه از این ربات استخراج شده است که شامل معادلات دینامیکی یک عملگر نیوماتیکی و یک شیربرقی تناسبی می باشد. متغیرهای نامعلوم معادلات دینامیکی شامل ضریب ویسکوزیته، نیروی اصطکاک عملگر و متغیرهای مربوط به شیربرقی بدست آمده و توسط الگوریتم ژنتیک شناسایی شده اند. سپس، کنترل موقعیت عملگر نیوماتیکی با توجه به این مدل و بر اساس طراحی کنترل کننده ی پسگام مدلغزشی انجام می گیرد. بعلاوه، معادلات سینماتیک ربات هگزاتار بدست می آید و با استفاده از یک روش ابتکاری با نام روش هندسی حل شبه سینماتیک، بدون استفاده از حسگرهای گران قیمت و بر اساس داده های حسگرهای پتانسیومتر خطی روی هر شاخه و حسگر دوران متصل شده بر روی مجری نهایی ربات، موقعیت مجری نهایی ربات محاسبه می شود. بدین ترتیب، کنترل موقعیت حلقه بسته ی ربات هگزاتار بر مبنای کنترل همزمان در فضای مفاصل و فضای کاری ربات به کمک کنترل کننده ی پسگام مدلغزشی و روش محاسبه ی موقعیت مجری نهایی ربات انجام می گیرد. مسیرهای مطلوب سینوسی برای ردیابی در راستا و حول هر یک از محورهای مختصات به منظور ارزیابی عملکرد استراتژی کنترلی به کارگرفته شده مورد آزمایش قرار می گیرند. نتایج آزمایش های عملی نشان می دهد که مسیرهای مطلوب مستقیم در راستا و دورانی حول محورهای مختصات به ترتیب با اندازه ای کمتر از ۲ سانتی متر و ۳ درجه ردیابی می شوند. این حد از دقت برای یک ربات نیوماتیکی بسیار مطلوب می باشد.
پژوهشگران
امیر سلیمی لفمجانی، جلال حاجیپور ماچیانی
کلمات کلیدی
گاف-استوارت، ربات موازی، مدلسازی دینامیکی، شبیه ساز پرواز، کنترل موقعیت، کنترل مسیر، مجری نهایی، درجه آزادی