


سال ساخت: 1396
اسم ربات: ربات تریپترون
سازندگان: حامد چلنگری جویباری
کاربرد ربات: برداشت-گذاشت، پرینتر سه بعدی
توضیحات
در طول سالیان اخیر، نظریه کنترل مدرن رشد قابل توجهی داشته و به بلوغ قابل توجهی رسیدهاست. شاخههای مختلف کنترل مدرن نظیر شناسایی سیستم، کنترل تطبیقی، کنترل مقاوم، کنترل ساختار متغیر و کنترل بهینه به صورت گسترده در صنایع و کاربردهای مختلف بویژه رباتیک مورد استفاده قرار گرفتهاست. با این وجود، در نظریه کنترل مدرن هنوز بسیاری چالشها در جنبه تئوری و عملی وجود دارد. یکی از این چالشها، نیاز به داشتن دانشی دقیق از مدل است که باعث میشود از روشهای کنترل مدرن به عنوان روشهای مبتنی بر مدل نامبرده شود. به عنوان مثال، در کنترل رباتهای موازی همچون ربات دلتا که دارای ساختار پیچیده هستند و مدلسازی آنها وظیفهای پیچیده و زمانبر است و در نهایت مدل بدستآمده از دقت کامل برخوردار نیست. در نقطه مقابل کنترل مبتنی بر مدل، روشهای کنترل هوشمند مبتنی بر داده قرار دارند که امروزه با توجه به رشد مفاهیم و نظریههای هوش مصنوعی و یادگیری ماشین، افقهای جدیدی را پیشروی محققان قرار دادهاند. کنترل دادهمحور این اجازه را به محققان میدهد که با استفاده از داده خروجی جمعآوری شده از سیستم، که پاسخی به ورودی اعمالشده به سیستم است، به طراحی کنترلر مورد نظر خود بپردازند. روشهای کنترل دادهمحور این مکان را فراهم میکنند که به تنظیم پارامترهای کنترلر پرداخته شود بدون این که نیاز به شناسایی مدل سیستم باشد. به این وسیله، میتوان تاثیر بخشهایی از دینامیک سیستم که برای ما مهمتر است را افزایش داد و همچنین تاثیر بخشهایی از دینامیک سیستم که مورد نظر نیست را کاهش داد یا از بین برد. به عنوان مثال، در ربات دلتا، میتوان با استفاده از روشهای مبتنی بر داده و یادگیری ماشین همچون یادگیری تقویتی، بدون نیاز به داشتن مدل دقیقی از ربات، ربات را با دقت مطلوبی کنترل کرد. در یادگیری تقویتی، سیستم نه بر اساس دستور العملهای کنترلی از پیش تعیینشده، که صرفا بر اساس تجربههای مختلف و دریافت پاداش یا جریمه، نحوه انجام صحیح وظیفه مورد نظر را یاد میگیرد.
تا کنون، روشهای مختلف مبتنی بر داده ارائه شدهاست. این روشها بر اساس داده مورد استفاده، به سه روش تقسیم میشوند: روش مبتنی بر داده آنلاین، روش مبتنی بر داده آفلاین و روش ترکیبی که از هر دو داده آنلاین و آفلاین استفاده می کند. همچنین اگر بخواهیم این روشها را بر اساس ساختار کنترلر دسته بندی کنیم شامل این موارد است: روشهای مبتنی بر ساختار کنترلر ثابت از پیش تعیین شده و روشهای مبتنی بر کنترلر با ساختار نامعلوم. یکی از مهمترین بخشها در کنترل داده محور بهینه سازی داده مورد استفاده در کنترلر است.
از جمله دیگر روشهای هوشمند قابل پیادهسازی بر روی رباتها بویژه ربات دلتا، می توان به کنترل مبتنی بر بینایی ماشین اشاره کرد. در این روش، کاربرد اصلی ربات دلتا که انجام عملیات گذاشت و برداشت اجسام است، با استفاده از سیستم بینایی ماشین پیادهسازی میشود. یک سیستم تشخیص اجسام که از یک شبکه عصبی تشکیل شده است، به شناسایی اجسام مورد نظر میپردازد و این امکان را برای ربات فراهم میکند که اجسام مورد نظر را از میان تمام اجسام در حال حرکت در محدوده کاری ربات برداشت کند. همچنین روشهای داده محور و هوشمند را میتوان به همراه روشهای کلاسیک و مدرن به کار برد. به عنوان مثال، روش كنترل بهينه تطبيقي بر مبناي يادگيري تقويتي براي سامانهاي با ديناميكهاي ناشناخته مورد استفاده قرار میگیرد. یا میتوان از روشهای شبکه عصبی به منظور تخمین بخشهای غیرخطی دنیامیک سیستم استفاده کرد.
توضیحات
در این پروژه ساختاری نوین برای کنترل هوشمند سیستمهای رباتیکی ارائه شده است که در حین کنترل، مدلی از رفتار سیستم را شناسایی و خود را با شرایط محیطی تطبیق میدهد. کنترل سیستمهای رباتیکی با معادلات پیچیده و غیرخطی بر اساس روشهای موجود دینامیکی موجود منجر به جواب مطلوب نشده که اغلب هرگونه تغییر در دینامیک ربات، اغتشاش محیطی و نایقینی در محاسبات این امر را غیر ممکن میسازد. بنابراین در پژوهش موجود، شناسایی رفتار غالب سیستم رباتیکی در مواجه شدن با انواع نایقینی و اغتشاشات مد نظر است. وجه تمایز این ساختار با روشهای قبلی، نگاه سیستماتیک از منظر زیرشاخههای کنترل و شناسایی و عدم نباز به داشتن دانش پیشین از سیستم رباتیکی است. تضمین کنترل و پایداری سیستم در کنار تضمین شناسایی از ملزومات این نگاه سیستماتیک بوده و کنترلکنندههای تطبیقی مقاوم بهترین ابزار برای استفاده در این ساختار قاعدهمند هستند. برای کنترل سیستمهای غیرخطی در قالب مدل خطی تطبیقی، تحمل عدم قطعیت مدل در حین شناسایی و کنترل لازم است. این ساختار همچنین باید از دیدگاه بالاتری با عنوان کنترلکننده عملیاتی مورد استفاده قرار بگیرد که کنترل و شناسایی همزمان از الزامات آن به شمار میآید. در سیستمهای رباتیکی با اعمال تحریک ناکافی، ماتریسهای کواریانس شناسایی به سمت تکینگی نزدیک شده که مانع از دقت بالای این روشها میشود. این نقطه ضعف ناشی از عدم توانایی روش حداقل مربعات خطای کلاسیک در تعدیل سازی پارامترهای شناسایی و فرار از تکینگی است. این ساختار به دلیل تلفیق روشهای حداقل مربعات خطا و کنترل مد لغزشی، قابلیت تطبیقپذیری در برابر اکثر دشواریهای کنترل و شناسایی را دارد. برای تطبیق ساختار با تغییرات محیط واقعی، بحث رتبه شناور و مدل در حال نمو مطرح میشود. با تلفیق مدل در حال نمو با ساختار کنترلی، تضمین پایداری سیستم حلقه-بسته و شناسایی ممکن میشود. در این صورت روش نوینی حاصل میشود که با تعمیم قوانین تطابقی، نوسانات تخمین در حین تحریک ناکافی را به صورت سیستماتیک تعدیل ساخته و ساختار در مدت زمان طولانی قادر است تحت این شرایط، سیستم حلقه-بسته رباتیکی را همزمان شناسایی و کنترل کند. از دیدگاه رباتیکی، رفتار شناسایی شده به رفتار سینماتیکی ربات در شرایط مانا همگرا میشود. این روش بر روی رباتهای موازی با معادلات پیچیده، از جمله رباتهای چشم چابک با 2 و 3 درجه آزادی و دلتای 3 و 4 درجه آزادی پیاده سازی شده و در مقایسه با روشهای مبتنی بر مدل ربات، از لحاظ پایداری و شناسایی سیستم، عملکرد بهتری نشان میدهد.
پژوهشگران
سعید انصاری، مهران غفاریان
کلمات کلیدی
ربات موازی، ربات پرنده، کنترل هوشمند، شناسایی سیستم، ربات دلتا، ربات چشم چابک دو درجه آزادی، ربات چشم چابک سه درجه آزادی، مدلسازی سینماتیکی
توضیحات
امروزه با پیشرفت علم رباتیک، که بسیار مورد توجه محققین و دانشمندان علوم مختلف قرار گرفته است، رباتها به سرعت در حال جایگزینی در خطوط تولید صنعتی هستند. کاربرد رباتها در صنایع مختلف از قبيل کاربردهای صنعتی تر همچون گذاشت و برداشت و مواردی پيچيده همچون صنایع ماشينكاری با ابعاد کوچك و دقت بالا ، ماشينكاری چند محوره ،مونتاژ و جوشكاری تا کاربرد هایی حساسی نظير پزشكی و جراحی گسترش یافته است و نياز به دقت و سرعت بيشتر آنها احساس میشود
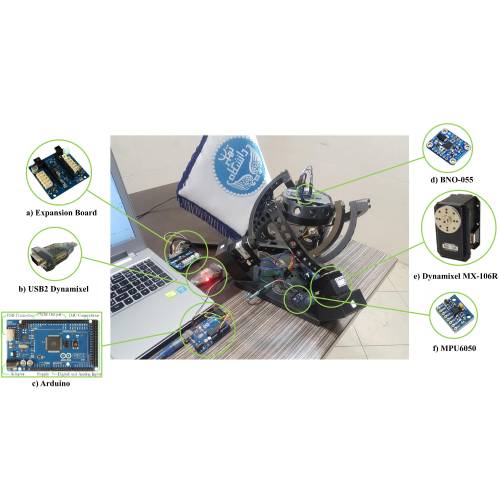
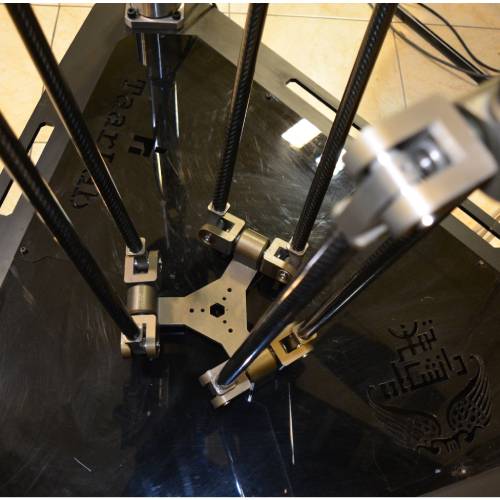
دو ربات دلتا ساختهشده در آزمایشگاه تعامل انسان و ربات دانشگاه تهران (تارلب)، فرم استاندارد ربات دلتای سه درجه آزادی می باشند.در یکی از این رباتها، موتورهای استفاده شده، از نوع AC Servo Motor از برند Kinco و سری SME و به همراه درایور است. توضیحات بیشتر در مورد موتور درآمده است. همچنین جعبهدنده استفاده شده از برند Apex Dynamics و از سری PEII و از نوع سیارهای و با دقت بالا است و با نسبت تبدیل یک به پنجاه است. ودر ربات دوم نیز از موتور های Lenze استفاده شده است و نیز فاقد جعبه دنده میباشد.
ربات دلتا یک سیستم غیرخطی است. به منظور کنترل ربات با سرعت بالا، معادلات باید با سرعت بالا حل شوند. به همین دلیل نیاز است که پارامترهای سینماتیک و دینامیکی ربات مشخص باشند تا بر مبنای آن بتوان به کنترل سریع دست یافت.
برای سیستم های غیر خطی، به صورت عمومی راه حل تحلیلی و جامعی وجود ندارد. اما با استفاده از رویکردهای هوش مصنوعی و کنترل هوشمند، می توان موضوع طراحی انواع کنترل کننده ها را، به جای روش های کنترلی کلاسیک و تحلیلی، از طریق ابزارهای هوش محاسباتی و به طور ویژه الگوریتم های تکاملی و فرا ابتکاری پیش برد.
در این پروژه ابتدا معادلات دینامیکی سیستم و ماتریسهای ژاکوبین ربات که نگاشتی بین فضای زاویهای و فضای خطی حوزه دسترسی ربات است بدست میآوریم ، سپس براي كنترل هر سيستمي ابتدا نياز به شناسايي آن سيستم است. بنابراين به دست آوردن و شناسايي پارامترهاي هر رباتي اولين گام جهت كنترل آن ربات است، با توجه به اینکه در یکی از رباتهای دلتای مورد نظر، حرکت موتورها از طریق جعبهدنده به باوزها منتقل میشود از از روشهای مرسوم شناسایی دینامیکی، مدلهایی برای قسمتهای مختلف ربات از جمله جعبهدنده و … نیازمند می باشیم سپس باتوجه به اینکه یکی از اهداف مورد، دستیابی به گذاشت و برداشت هوشمند برای دلتا می باشد. در مرحله بعد به دنبال طراحی و برنامه نویسی ساختاری می باشیم که بتواند از طریق بینایی ماشین و سنسور های مسافت سنج موقعیت عملگر نهایی را بدست بیاورد و همچنین جسم را شناسایی کند و موقعیت آن را اعلام نماید، که این ساختار میتواند به عنوان باز خورد به سسیتم کنترلی کمک کند و از طریق آن کنترل بهتری را انجام داد. سپس با استفاده از الگوریتمهای کنترلی، ربات کنترل میشود. هدف، رسیدن به کنترلی دقیق و پیوسته است که قادر به کنترل ربات بدون واردشدن ضربات و با سرعت مناسب است. در مرحله بعد، انواع کنترلرهای برای یافتن عملکرد مطلوب ربات و با توجه به تواناییهای سختافزار مکانیکی و الکترومکانیکی و درایورهای موتور، روی ربات پیادهسازی میشود. و در نهایت به دنبال پیاده سازی الگوریتمهای هوشمند کنترلی و استفاده از روش های یادگیری و هوش مصنوعی در شناسایی و کنترل می باشیم.
پژوهشگران
حسن جلالی
کلمات کلیدی
ربات موازی، کنترل هوشمند، شناسایی سیستم، پردازش تصویر، یادگیری عمیق، ربات دلتا، شبکههای عصبی کانولوشن، یادگیری تقویتی
به زودی این بخش تکمیل خواهد شد.
