سال ساخت: —
اسم ربات: —
سازندگان: —
کاربرد ربات: —
توضیحات
ربات کابلی، یک ربات موازی است که برای کنترل موقعیت و جهت گیری به جای لینکهای صلب از از کابل استفاده می شود. در این نوع ربات ها ، کابلها فقط می توانند عملگر نهایی را بکشند و نیروی درون کابل همیشه مثبت خواهد بود. در مقایسه با ربات های موازی با لینکهای صلب، ربات موازی کابلی فضای کار بزرگ در کنار سهولت مونتاژ را فراهم می کند که برای ضبط فیلم یا تصاویر در مناطق بزرگ با دقت بالا یا جابجایی اجسام سنگین بسیار مفید است. در ربات کابلی، وقتی تعداد موتورها از تعداد درجات آزادی ربات کمتر باشد، ربات موازی کابلی مقید ناقص نامیده می شود. در ربات موازی کابلی مقید ناقص، موقعیت و جهتگیری عملگر نهایی در حالتی تعیین می شود که در آن انرژی پتانسیل گرانشی عملگر نهایی به حداقل می رسد. برای حل سینماتیک مستقیم ربات موازی کابلی مقید ناقص، سه نوع شبکه عصبی شامل ، پرسپترون چندلایه ، توابع پایه شعاعی و درخت مدل خطي محلي ، بر اساس سازگاری با رفتار قابل توجه داده ها در نظر گرفته شد. حل مسئله سینماتیک مستقیم ربات کابلی مقید ناقص به دلیل پیچیدگی و غیرخطی بودن معادلات حرکتی ربات مشکل است و به همین دلیل از یک روش عددی برای حل این معادلات استفاده میشود که از نظر محاسباتی گران قیمت و وقت گیر است. شبکه عصبی آموزش دیده شده این امکان را فراهم میکند تا نه تنها تمامی کابلها در کشش باشند بلکه بتوان سینماتیک مستقیم ربات را به صورت آنلاین حل کرد و ربات را به صورت آنلاین کنترل کرد. در ادامه، روشی برای تولید مدل سه بعدی اجسام با هر اندازهای محدود به فضای کاری ربات معرفی شد. مهمترین مشکل ربات کابلی مقید ناقص معلق، مستقل نبودن جهتگیری و موقعیت عملگر نهایی است. مشکل فوق با استفاده از یک تثبیت کننده برای ضبط فیلم در جهت های تعیین شده حل شد. نتایج نشان می دهد که با کنترل عملگر نهایی می توان به تولید مدل سه بعدی اجسام بر اساس فیلم های گرفته شده از یک دوربین که بر روی عملگر نهایی ربات نصب شده است، پرداخت. یکی از اجسام انتخاب شده برای تولید مدل سهبعدی، ربات اجتماعی به نام Sanbot است که دارای سطحی براق است که از دقت بازسازی مدل سه بعدی می کاهد. با این حال ، نتایج نشان می دهد که مدل سه بعدی ربات Sanbot دقت بسیار خوبی دارد و نتایج تجربی کارآیی روش پیشنهادی را تأیید می کند. این روش راهی آسان برای تولید مدل سه بعدی یک جسم فراهم می کند، که با روش های دیگر قابل بازسازی نیست. در راستای اهداف این پروژه ، کنترل دینامیکی نوع چند ورودی – چند خروجی ربات کابلی مقید ناقص فضایی با استفاده از الگوریتم ژنتیک طراحی شد. اهداف بعدی این پروژه تجزیه و تحلیل مدل دینامیکی ربات و پیاده سازی کنترل کننده دینامیکی بر روی ربات مذکور است.
توضیحات
بحث ربات های موازی کابلی یکی از زمینه های رو به گسترش در علم رباتیك است که در دو دهه اخیر به آن بیشتر توجه شده است. این نوع مکانیزم ها شامل زنجیره های بسته سینماتیکی می باشند كه عملگر نهایی از طریق كابل به پایه متصل می گردد. انگیزه اصلی در استفاده از چنین مکانیزم هایی، جبران نارسایی های ساختارهای رایج مکانیزم های سری نظیر دقت كم، انباشتگی خطا، سختی كم و قدرت حمل بار پایین و همچنین جبران نارسایی ساختارهای موازی غیركابلی از جمله فضای كاری محدود و وجود تكینگی های زیاد داخل فضای كاری بوده است. از دیگر مزایای این نوع ساختار این است كه معمولا بسیار سبك تر از نمونه های سری و موازی غیر كابلی هستند
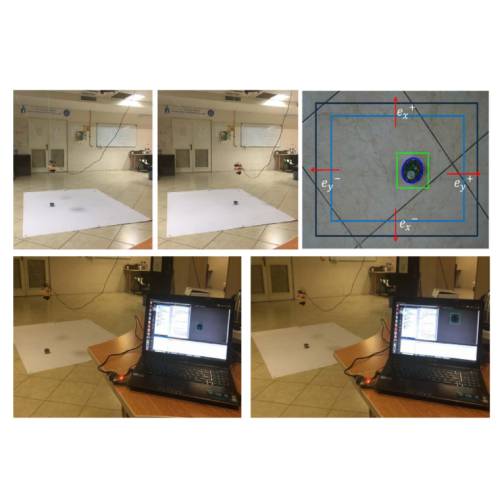
در این پروژه هدف اصلی کنترل ربات کابلی فضای نامقید بینا، ساخته شده در آزمایشگاه تعامل انسان و ربات، جهت تعقیب جسم یا اجسام به کمک پردازش تصویر است. در بین دسته بندی های مختلف ربات های کابلی، نوع نامقید آن نسبت به مقید کامل و بیشینه مقید چالش برانگیزتر است زیرا درجات آزادی ربات بیشتر از تعداد عملگرها بوده و معادلات سینماتیکی و استاتیکی دینامیکی، ربات به طور هم زمان باید در نظر گرفته شوند. برای کنترل هرچه بهتر یک سیستم به دست آوردن معادلات آن الزامی است. علاوه بر معادلات دینامیکی می بایست معادلات سینماتیکی و استاتیکی ربات های کابلی به دست آیند. به منظور یافتن موقعیت ربات در هر لحظه و استفاده از آن جهت کنترل ربات، دو روش جهت حل معادلات سینماتیک مستقیم ربات های کابلی نامقید، که یکی از چالش برانگیزترین مسائل در این ربات ها است، با هدف به دست آوردن موقعیت مجری نهایی پیشنهاد و از صحت آن اطمینان حاصل شد. کنترلرهای متفاوتی در این پروژه ابتدا به صورت شبیه سازی انجام شد و بهترین آن پیاده سازی عملی شد. به عنوان مثال می توان به کنترلر سینماتیکی موقعیت، کنترلر مودلغزشی، کنترلر تطبیقی و کنترل به روش گشتاور محاسبه شده اشاره نمود. همچنین سنسورهای مختلفی روی ربات، جهت استفاده از اطلاعات آن ها در الگوریتم های کنترلی، طراحی و روی ربات نصب شدند. در این راستا سنسوری جهت تبدیل نیروی خمشی به کشش با ویژگیهای منطبق بر ربات، جهت اطلاع از نیروی درون هر کابل، طراحی شد. کنترلرهای طراحی شده بر روی ربات کابلی موازی ساخته شده در آزمایشگاه پیاده گشته و نتایج آن ها حاکی از عملکرد مناسب این کنترلر ها است. در پایان به کمک پردازش تصویر عملیات تعقیب جسم توسط ربات صورت گرفته و الگوریتمی جهت تعقیب و در تصویر داشتن هر تعداد جسم پیشنهاد گردید.
پژوهشگران
علی افلاکیان
کلمات کلیدی
ربات موازی، ربات کابلی، کنترل هوشمند، بینایی ماشین، یادگیری عمیق، الگوریتم بهینهسازی، مدلسازی دینامیکی، مدلسازی سینماتیکی، شبکههای عصبی کانولوشن
توضیحات
لورم ایپسوم متن ساختگی با تولید سادگی نامفهوم از صنعت چاپ، و با استفاده از طراحان گرافیک است، چاپگرها و متون بلکه روزنامه و مجله در ستون و سطرآنچنان که لازم است، و برای شرایط فعلی تکنولوژی مورد نیاز، و کاربردهای متنوع با هدف بهبود ابزارهای کاربردی می باشد، کتابهای زیادی در شصت و سه درصد گذشته حال و آینده، شناخت فراوان جامعه و متخصصان را می طلبد، تا با نرم افزارها شناخت بیشتری را برای طراحان رایانه ای علی الخصوص طراحان خلاقی، و فرهنگ پیشرو در زبان فارسی ایجاد کرد، در این صورت می توان امید داشت که تمام و دشواری موجود در ارائه راهکارها، و شرایط سخت تایپ به پایان رسد و زمان مورد نیاز شامل حروفچینی دستاوردهای اصلی، و جوابگوی سوالات پیوسته اهل دنیای موجود طراحی اساسا مورد استفاده قرار گیرد.
پژوهشگران
مرتضی دانشمند
کلمات کلیدی
مکانیزمهای موازی صفحهای، فضای کاری، حساسیت سینماتیکی، بهینهسازی، مفاصل غیرفعال، بهینهسازی محدب
توضیحات
لورم ایپسوم متن ساختگی با تولید سادگی نامفهوم از صنعت چاپ، و با استفاده از طراحان گرافیک است، چاپگرها و متون بلکه روزنامه و مجله در ستون و سطرآنچنان که لازم است، و برای شرایط فعلی تکنولوژی مورد نیاز، و کاربردهای متنوع با هدف بهبود ابزارهای کاربردی می باشد، کتابهای زیادی در شصت و سه درصد گذشته حال و آینده، شناخت فراوان جامعه و متخصصان را می طلبد، تا با نرم افزارها شناخت بیشتری را برای طراحان رایانه ای علی الخصوص طراحان خلاقی، و فرهنگ پیشرو در زبان فارسی ایجاد کرد، در این صورت می توان امید داشت که تمام و دشواری موجود در ارائه راهکارها، و شرایط سخت تایپ به پایان رسد و زمان مورد نیاز شامل حروفچینی دستاوردهای اصلی، و جوابگوی سوالات پیوسته اهل دنیای موجود طراحی اساسا مورد استفاده قرار گیرد.
پژوهشگران
حسن بیانی
کلمات کلیدی
رباتهای موازی کابلی، بهینهسازی محدب، سنتز ابعادی، سینماتیک، دینامیک، پردازش تصویر، کنترل و شناسایی سیستم

توضیحات
لورم ایپسوم متن ساختگی با تولید سادگی نامفهوم از صنعت چاپ، و با استفاده از طراحان گرافیک است، چاپگرها و متون بلکه روزنامه و مجله در ستون و سطرآنچنان که لازم است، و برای شرایط فعلی تکنولوژی مورد نیاز، و کاربردهای متنوع با هدف بهبود ابزارهای کاربردی می باشد، کتابهای زیادی در شصت و سه درصد گذشته حال و آینده، شناخت فراوان جامعه و متخصصان را می طلبد، تا با نرم افزارها شناخت بیشتری را برای طراحان رایانه ای علی الخصوص طراحان خلاقی، و فرهنگ پیشرو در زبان فارسی ایجاد کرد، در این صورت می توان امید داشت که تمام و دشواری موجود در ارائه راهکارها، و شرایط سخت تایپ به پایان رسد و زمان مورد نیاز شامل حروفچینی دستاوردهای اصلی، و جوابگوی سوالات پیوسته اهل دنیای موجود طراحی اساسا مورد استفاده قرار گیرد.
پژوهشگران
سینا ولی، رامین مرسی
کلمات کلیدی
ربات موازی، ربات کابلی، طراحی، ساخت، مدلسازی سینماتیکی

توضیحات
هدف این پایان نامه ، کنترل ربات کابلی مقید ناقص معلق برای تولید مدل سهبعدی اجسام است. اول ، سه نوع شبکه عصبی شامل ، پرسپترون چندلایه ، توابع پایه شعاعی و درخت مدل خطي محلي ، بر اساس سازگاری با رفتار قابل توجه داده ها برای حل سینماتیک مستقیم و معکوس ربات کابلی مقید ناقص معلق در نظر گرفته شد. فضای کاری این ربات یک مکعب مستطیل با ابعاد 360 سانتی متر × 220 سانتی متر × 160 سانتی متر است. حل مسئله سینماتیک مستقیم ربات کابلی مقید ناقص به دلیل پیچیدگی و غیرخطی بودن معادلات حرکتی ربات مشکل است و به همین دلیل از یک روش عددی برای حل این معادلات استفاده میشود که از نظر محاسباتی گران قیمت و وقت گیر است. شبکه عصبی آموزش دیده شده،این امکان را فراهم میکند تا نه تنها تمامی کابلها در کشش باشند بلکه بتوان سینماتیک مستقیم ربات را به صورت آنلاین حل کرد و ربات را به صورت آنلاین کنترل کرد. نتایج به دست آمده نشان می دهد که پرسپترون چند لایه بهترین عملکرد را دارد و میانگین مربع خطاها در حدود 2 میلی متر برای موقعیت و 0.78 درجه برای جهت گیری است، که این امر باعث می شود کنترل دقیق در حرکت سریع ربات انجامپذیر شود. در راستای اهداف این پایان نامه، روشی برای تولید مدل سه بعدی اجسام با هر اندازهای محدود به فضای کاری ربات معرفی شد. مهمترین مشکل ربات کابلی مقید ناقص معلق، مستقل نبودن جهتگیری و موقعیت عملگر نهایی است. مشکل فوق با استفاده از یک استبیلایزر برای ضبط فیلم در جهت های تعیین شده حل شد. نتایج نشان می دهد که با کنترل عملگر نهایی می توان به تولید مدل سه بعدی اجسام بر اساس فیلم های گرفته شده از یک دوربین که بر روی عملگر نهایی ربات نصب شده است، پرداخت. یکی از اجسام در نظر گرفته شده در این پایاننامه، ربات اجتماعی به نام Sanbot است که دارای سطحی براق است که از دقت بازسازی مدل سه بعدی می کاهد. با این حال ، نتایج نشان می دهد که مدل سه بعدی ربات Sanbot دقت بسیار خوبی دارد و نتایج تجربی کارآیی روش پیشنهادی را تأیید می کند. این روش راهی آسان برای تولید مدل سه بعدی یک جسم فراهم می کند ، که با روش های دیگر قابل تولید نیست. در راستای اهداف این پروژه ، کنترل دینامیکی نوع چند ورودی – چند خروجی ربات کابلی مقید ناقص فضایی با استفاده از الگوریتم ژنتیک طراحی شد. اهداف بعدی پایان نامه تجزیه و تحلیل مدل دینامیکی ربات و پیاده سازی کنترل کننده دینامیکی بر روی ربات مذکور است.
پژوهشگران
سروش زارع
کلمات کلیدی
ربات موازی کابلی، ربات مقید ناقص، پردازش تصویر، تولید مدل سهبعدی، شبکه عصبی

توضیحات
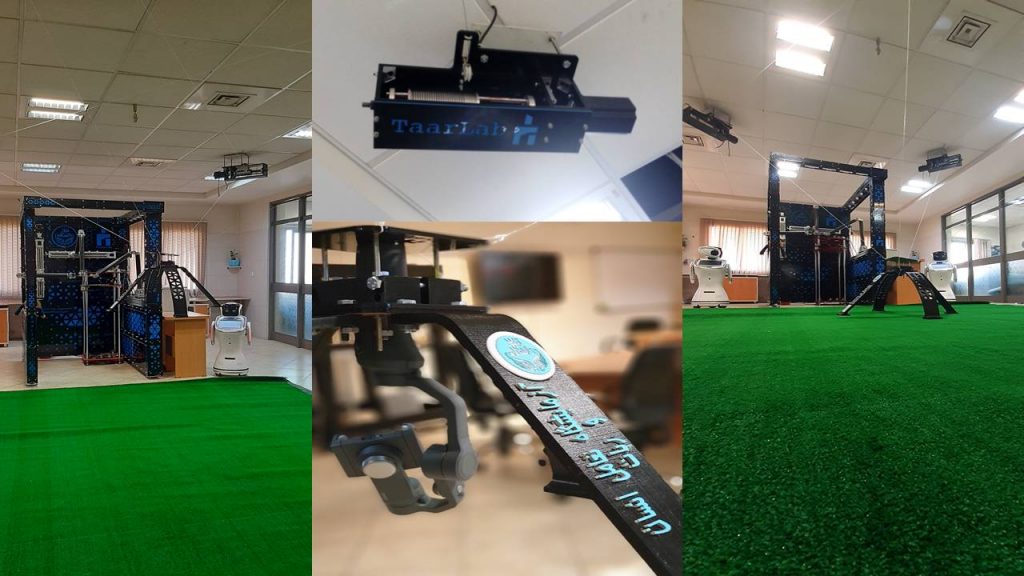
تمرکز این پژوهش بر روی استفاده از رباتهای موازی معلق کابلی برای فیلمبرداری اتوماتیک از بازیهای فوتبال و همچنین محاسبهی اطلاعات آماری بازیهای فوتبال با استفاده از تکنیکهای بینایی ماشین است.
یک دوربین که بر روی یک گیمبال واقع شده بر روی عملگرنهایی یک ربات موازی معلق کابلی قرار میگیرد. همچنین یک زمین فوتبال با مقیاس کوچک در زیر ربات قرار میگیرد. عملگرنهایی ربات به طور اتوماتیک بر روی مسیری حرکت میکند که به دوربین قرار گرفته بر روی عملگرنهایی ربات این قابلیت را بیفزاید که از بازی فوتبالی که در زمین فوتبال در حال انجام است به طور مناسبی فیلمبرداری نماید. همچنین تعدادی دوربین ثابت در اطراف زمین فوتبال قرار گرفته است که تصاویر گرفته شده توسط آنها با تصاویر گرفته شده توسط دوربین قرار گرفته بر روی عملگرنهایی ربات ترکیب شده و سپس از این دادهها جهت بدست آوردن اطلاعات آماری بازی فوتبال استفاده میشود.
در مرحله نخست به بدست آوردن معادلات سینماتیکی و مدل دینامیکی ربات موازی معلق کابلی پرداخته میشود و سپس این معادلات توسط محیط SimMechanics از نرمافزار متلب مورد تایید قرار میگیرند. همچنین یک روش کنترلی برای کنترل موقعیت عملگرنهایی ربات با کمترین میزان نوسانات ارائه میشود. در این پژوهش از کتابخانه OpenCV زبان برنامهنویسی پایتون به طور گسترده جهت تحلیل تصاویر دریافت شده استفاده میشود. سیگنالهای کنترلی به نحوی به ربات ارسال میشوند که عملگرنهایی ربات در موقعیتهایی قرار گیرد که دوربین قرار گرفته بر روی آن بتواند توپ و چند بازیکن اطراف آن را در یک فریم قرار داده و از آنها فیلمبرداری نماید .
ضرورت این پژوهش از اهمیت جهانی بازیهای فوتبال و تصویربرداری و پخش آنها و همچنین جنبههای اقتصادی و منافع موجود در آنها ناشی میشود. امروزه نیاز به سیستمی که بتواند به طور خودکار از بازیهای فوتبال فیلمبرداری نماید و همچنین به طور آنی اطلاعات آماری بازیهای فوتبال را بدست آورد بیش از پیش احساس میشود. از آنجایی که سیستمهایی که امروزه برای فیلمبرداری از بازیهای فوتبال استفاده میشوند حداقل در یکی از مراحل به دست کم چند اپراتور برای فیلمبرداری از بازیهای فوتبال نیاز دارند، ارائه یک سیستم که بتواند تمامی مراحل را به طور خودکار انجام دهد میتواند نه تنها بسیار مفید بلکه بسیار نوین باشد. شرکتهایی وجود دارند که به مشتریان خود ( که عموما شامل مربیان فوتبال، لیگها و آژانسهای خبری هستند) اطلاعات آماری بازیهای فوتبال را ارائه میدهند. نکته منفی در مورد محصولات این دسته از شرکتها قیمت بالای آنها میباشد که به افراد معمولی این قابلیت را نمیدهد که بتوانند از این امکانات بهرهمند شوند. بر خلاف محصولات این شرکتها، این پژوهش از دوربینهای معمولی و کتابخانه منبع باز OpenCV برای محاسبه آمار بازیهای فوتبال استفاده میکند که میتواند هزینه را به حداقل برساند.
این پروژه بر روی ربات موازی معلق کابلی موجود در آزمایشگاه تعامل انسان و ربات انجام شده است و بر روی زمین فوتبال مصنوعی این آزمایشگاه مورد تست و ارزیابی قرار گرفته است. نتایج بدست آمده رضایتبخش بوده و این پژوهش این آمادگی را دارد که بر روی یک زمین فوتبال به اندازه واقعی گسترش داده شود.
پژوهشگران
محمد قناعتیان
کلمات کلیدی
ربات موازی، ربات کابلی، کنترل هوشمند، شناسایی سیستم، پردازش تصویر، یادگیری عمیق، الگوریتم بهینه سازی، مسیریابی ربات، مدل سازی دینامیکی، مدل سازی سینماتیکی، شبکههای عصبی کانولوشن، شبکههای بازگشتی، یادگیری تقویتی