سال ساخت: —
اسم ربات: —
سازندگان: —
کاربرد ربات: —
توضیحات
همه چیز از جایی آغاز شد که فردی پس از بازدید از یک کارخانهی شکلاتسازی به این فکر فرو رفت که چگونه میتوان مکانیزمی ساخت که بادام را با سرعتی بسیار بالا درون بستههای شکلات قرار دهد. این فرد یکی از اعضای تیمی بود که توسط ریموند کلاول استاد موسسه فناوری سوئیس در لوزان مدیریت میشد. این تفکر و تلاش اعضای گروه بر روی این پروژه، اختراع ربات دلتا در اوایل دهه 1980 میلادی را به دنبال داشت.
در سال 1987 شرکت سوئیسی دامارکس امتیاز این ربات را خریداری کرده و تولید انبوه آن را با هدف بستهبندی در صنایع در پیش میگیرد. در سال 1991 ریموند کلاول از رساله دکتری خود دفاع کرده و در سال 1999 جایزه ربات طلایی را به منظور طراحی و توسعه ربات دلتا دریافت میکند. در همین سال دو شرکت دیگر نیز تولید و فروش رباتهای دلتای خود را آغاز کردند که همین امر باعث ایجاد فضای رقابتیتری در این حوزه شد. در دو دهه اخیر مکانیزمهای موازی از ساختارهای حاشیهای همانند سهپایههای عکاسی گرفته تا مکانیزمهای پراستفادهی صنعتی همچون ربات دلتا تکامل یافتهاند. این مکانیزمها با توجه به مشخصات سینماتیکی قابل توجهی که داشتند نظر محققان و صنعتگران را به خود جلب کرده بودند و این در حالی بود که طراحان، این مکانیزمها را با خلاقیت خودشان طراحی مینمودند. این پیشرفتها تا جایی ادامه یافت که پژوهشگران در سال 2017 موفق به ساخت ربات دلتا در ابعاد میلیمتری شدند. این ربات توانایی حمل باری به اندازهی 3/1 گرم در فضای کاری حدود 7 میلیمتر مکعب با دقت 5 میکرون با حداکثر سرعت 45/0 متر بر ثانیه را دارا میباشد.
یکی از ویژگیهای شاخص ربات دلتا سرعت بسیار بالای آن در جابجایی اجسام بهخصوص اجسام سبک میباشد. همین ویژگی کافی است تا صنایع با اشتیاق فراوان از این ربات استقبال کرده و پای آن را به خطوط تولید خود باز کنند. زیرا زمان پارامتری بسیار پراهمیت است و هزینهکردن برای صرفهجویی در آن امری غیرقابل چشمپوشی میباشد. یکی دیگر از ویژگیهای بارز این ربات، دقت بالای آن در مکانیابی است که باعث میشود این ربات از بسیاری از مکانیزمهای دیگر پیشی بگیرد. از کاربردهای این ربات میتوان به موارد زیر اشاره کرد.
یکی از رایجترین کاربردهای مکانیزم موازی دلتا بستهبندی مواد غذایی و دارویی است. زیرا در این صنایع تا جای ممکن باید از دخالت دست انسان در فرآیند تولید و بستهبندی خودداری شود. از طرفی سرعت انجام کار پارامتر بسیار مهمی است که تا حد امکان باید به آن توجه داشت. بنابراین در این فرآیند باید از مکانیزمی استفاده شود که از سرعت بسیار بالایی برخوردار باشد که ربات دلتا یکی از بهترین انتخابها در این زمینه است.
در خطوط تولید کارخانهها و صنایع فعالیتهای مختلفی صورت میگیرد. از جمله این فعالیتها میتوان به عملیات پرکردن بطریها از مایعات، شناسایی قطعات معیوب، چسباندن برچسب بر روی بستهبندی و همچنین انتقال اجسام از محلی به محل دیگر اشاره کرد. فعالیت آخری که در بین مثالها ذکر شد اصطلاحا با نام گذاشت و برداشت شناخته میشود که یکی از مهمترین آنها در فرآیند تفکیک زبالهها در صنایع بازیافت صورت میگیرد. با مکانیزهشدن این فرآیند، با نصب دوربین در بالای خطوط عبور زبالهها و استفاده از تکنولوژی پردازش تصویر، میتوان زبالهها را از یکدیگر تشخیص داده و با استفاده از مکانیزمی مثل ربات دلتا آن را از سایر زبالهها جدا نمود.
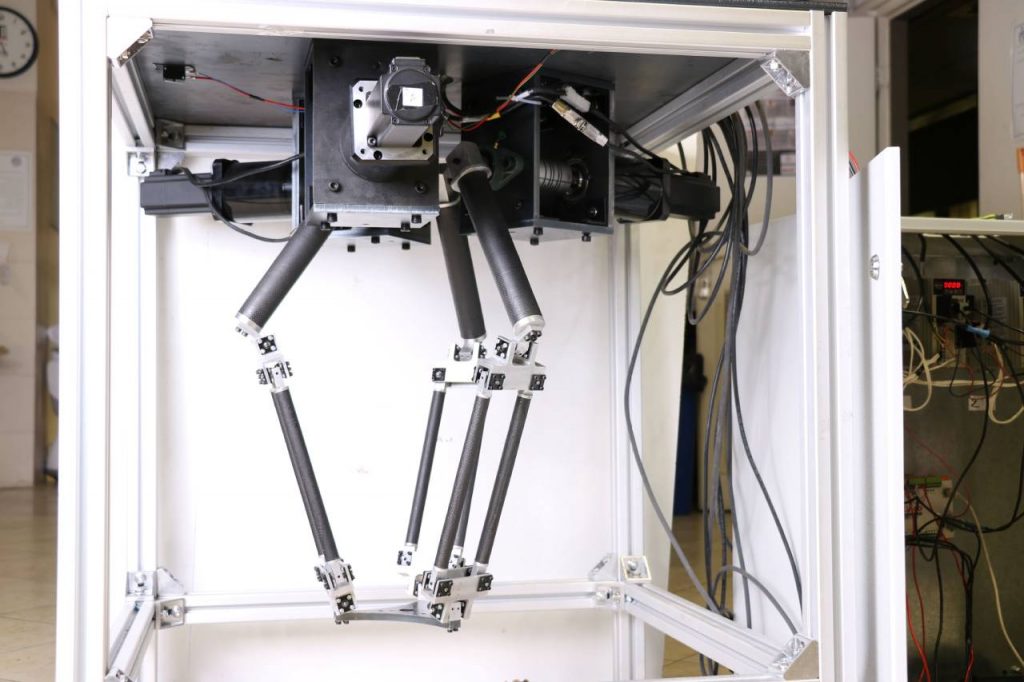
در آزمایشگاه تعامل انسان و ربات دانشگاه تهران تا به حال سه نسخه از ربات دلتای 3 درجه آزادی ساخته شده است. نسخه اول این ربات با رویکرد آزمایشگاهی و به منظور انجام فعالیتهای پژوهشی بر روی این ربات ساخته شده است. نسخه دوم آن با رویکرد صنعتی برای آمادهسازی این پلتفرم برای کار در محیطهای مختلف صنعتی برای مثال جهت بستهبندی مواد غذایی و دارویی و بازیافت زباله ساخته شده است. نسخه سوم آن نیز با رویکرد نمایشی به منظور دستیابی به سرعت، شتاب و دقت موقعیتیابی بالا جهت نمایش توانایی بالای عملگرهای مورد استفاده و توانمندیهای خود ربات در این آزمایشگاه توسعه یافته است.
توضیحات
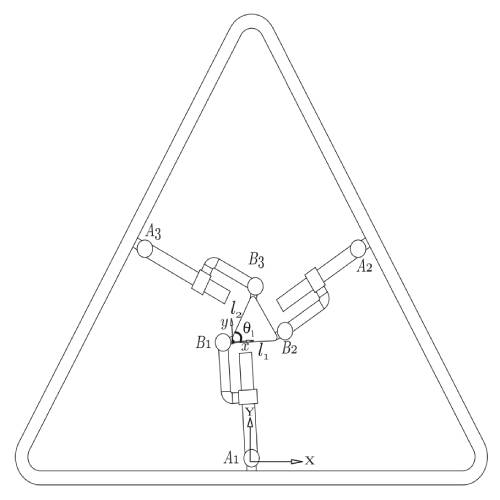
ربات دلتا را میتوان یکی از موفقترین و پرکاربردترین انواع رباتهای موازی دانست که هماکنون صدها و شاید هزاران نمونه از آن در سرتاسر دنیا مورد استفاده میباشد. این ربات اولین بار در سال 1985 میلادی توسط آقای ریموند کلاول، استاد دانشگاه EPFL سوئیس ارائه شد. این ربات یک مکانیزم موازی با سه درجه آزادی انتقالی میباشد. رباتهای موازی با وجود فضای کاری محدودتری که نسبت به رباتهای سری دارند، از سرعت، دقت و سختی بالاتری برخوردار هستند. از این نوع ربات در صنایع تولیدی مختلفی از جمله داروسازی، مواد غذایی و بازیافت پسماند که در آنها میبایست از دخالت دست انسان خودداری شود، کاربرد زیادی دارد. در این پروژه، طراحی، ساخت و راهاندازی ربات دلتای سه درجه آزادی و در پی آن طراحی و پیادهسازی تجربی یک کنترلکننده تناسبی-انتگرالی-مشتقگیر برای ربات صورت میگیرد. به این منظور، ابتدا مدل این ربات در یکی از نرمافزارهای طراحی سهبعدی معتبر مدلسازی شده و سپس این مدل سینماتیکی در بخش سیمولینک متلب مورد آزمایش قرار میگیرد. با استفاده از این مدل میزان گشتاور و دور مورد نیاز عملگرها در حرکتهای مطلوب به دست آمده و موتورهای مناسب برای این ربات انتخاب میشود. سپس، ربات براساس طرح ساخته و راهاندازی شده و عملکرد آن در حرکتهای مختلف از جمله مسیرهای خطی، دایرهای و مسیر استاندارد گذاشت و برداشت مورد آزمایش قرار میگیرد. به طور موازی این مسیرها در شبیهسازی نیز صورت میگیرد. سپس، یک کنترلکننده تناسبی-انتگرالی-مشتقگیر به منظور کنترل موقعیت ربات طراحی شده و عملکرد آن از طریق شبیهسازی در نرمافزار مذکور مورد ارزیابی قرار میگیرد. در نهایت، کنترلکننده مذکور بهصورت تجربی بر روی ربات دلتای مورد بررسی پیادهسازی شده و با انجام آزمونهای تجربی، عملکرد سیستم حلقه بسته مورد ارزیابی قرار میگیرد. همچنین، نتایج حاصل از شبیهسازی و آزمون تجربی مورد مقایسه قرار میگیرند. پس از انجام موارد فوق مشاهده میشود که ربات ساختهشده صرف نظر از وجود کوپلینگها از سختی بالا و در مسیریابی از دقت بالایی برخوردار میباشد. همچنین مشاهده میشود که پس از کنترل ربات، مسیریابی با دقت قابل قبولی صورت میگیرد، اما برخی از اوقات به دلیل وجود نویز اطلاعات به درستی از انکودر موتورها دریافت نشده و ربات به همراه ضربه کار میکند. این مشکل نیز با رفع نویز قابل حل میباشد.
پژوهشگران
سینا ولی، رامین مرسی
کلمات کلیدی
ربات دلتا، ربات موازی، رویکرد صنعتی، رویکرد آزمایشگاهی، رویکرد نمایشی
توضیحات
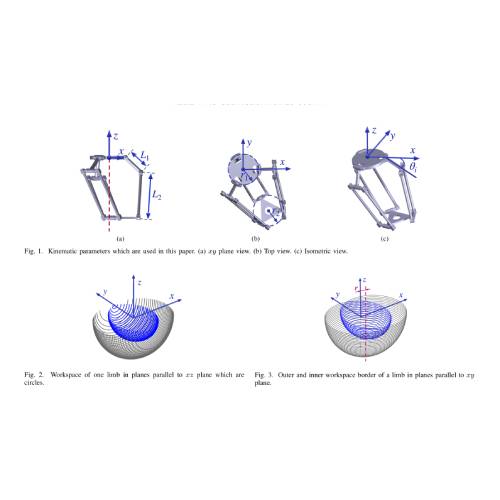
رباتهای موازی در مقایسه با رباتهای سری دارای مزایای قابل توجهی از جمله صلبیت بالا و وزن کم هر یک از شاخهها هستند. این خصوصیات منجر می شود که رباتهای موازی توانایی دستیابی به سرعتها و شتابهای بالا را در کنار دقت زیاد این عملگرها داشته باشند. نقطه ضعف رباتهای موازی پیچیدگی معادلات سینماتیکی و دینامیکی حاکم بر آنها و فضای کاری محدود این دسته از رباتها می باشد. بدین ترتیب جهت تحلیل سینماتیکی و تعیین نقاط تکین رباتهای موازی از یک طرف و استخراج معادلات دینامیکی حاکم بر آن از طرف دیگر، نیاز به فرمولاسیونهای بسته ای برای این دسته از رباتها احساس می شود. جهت بهرهمندی از دقت بالای رباتهای موازی، مدل سازیهای انجام شده می بایست دارای دقت بالا و بدون ساده سازی مکانیزم باشد. بدیهی است که پس از بدست آوردن معادلات دینامیکی نیازمند شناسایی پارامترهای اینرسی ربات بوده ایم چراکه علاوه بر ارائه فرمولاسیون دینامیکی دقیق، نیازمند در دست داشتن مقادیر دقیق پارامترها جهت دستیابی به مدل دینامیکی دقیق هستیم.
بدین ترتیب در این پایان نامه به تحلیل سینماتیکی، دینامیکی، شناسایی و کنترل ربات موازی دلتای 3 درجه آزادی در کنار ربات موازی دلتای 4 درجه آزادی پرداخته شده. جهت تحلیل سینماتیکی از تئوری پیچه بهره برده که فرمولاسیون بسته ای را از معادلات حاکم بر هر شاخه از ربات و کل ربات به ما می دهد. در کنار این مهم، توسط تئوری پیچه درک خوبی از حرکت پذیری و فضای کاری ربات حاصل می شود. در مرحله بعد یعنی تحلیل دینامیکی ربات که نیازمند معادلات دقیق سینماتیکی می باشد، با بهره مندی از اصل کار مجازی معادلات حاکم بر رباتهای موازی دلتای 4 و 3 درجه آزادی (معادلات 4 بدست آمده و توسط اعمال معادله قیدی به دلتای 3 تبدیل می شود) به صورت خطی نسبت به پارامترهای اینرسی آنها بدست آمده است. در روش کار مجازی، بر خلاف روش نیوتن-اویلر، نیازی به محاسبه نیروها و گشتاورهای داخلی نبوده و همچنین از آنجا که این رباتها از دسته رباتهای موازی بیشینه مقید می باشند، ساختار هندسی آنها دارای قیدهای حلقه بسته زیادی هستند که استخراج معادلات را توسط روش لاگرانژ بغرنج می کند. چراکه در فرمولاسیون لاگرانژ این رباتها تعداد ضرایب لاگرانژ زیادی وجود خواهد داشت. از طرف دیگر، این قیدهای موجود در هندسه ربات منجر می شود که رگرسورهای معادله دینامیکی خطی نوشته شده با یکدیگر مستقل نباشند. بنابراین برای شناسایی پارامترهای اینرسی ربات می بایست اولا پارامترهای اینرسی را که دارای اثر مشابه در پاسخ دینامیکی سیستم دارند را دسته بندی کرده و همچنین پارامترهایی را که در پاسخ دینامیکی سیستم موثر نیستند را حذف نماییم. بدین ترتیب با استخراج پارامترهای اینرسی پایه، مدل دینامیکی کاسته شده ربات بدست می آید. اما بدست آوردن پارامترهای اینرسی پایه نیازمند ورودیهایی با درجه تحریک بالا می باشد. این ورودی بهینه توسط الگوریتم ژنتیک بهینه سازی شده و به هر یک از محرکهای ربات وارد می شود. در ادامه، جهت شناسایی آنلاین پارامترها می دانیم که نیازمند ورودی با درجه تحریک کافی هستیم که در رباتهای موازی این مقدار کافی عددی بسیار بزرگ است و اغلب ورودیها این خصوصیت را دارا نیستند. در نتیجه در این پژوهش الگوریتم نوین SVD-DLS یا به عبارتی روش حداقل مربعات کاهش یافته بر پایه روش تجزیه مقادیر ویژه ارائه می شود که در آن با تنظیم آنلاین تعداد پارامترهای اینرسی پایه و همچنین فرمولاسیون آنها، مدل مناسب با ورودی سیستم بدست آمده و در هر مرحله و با هر مقدار درجه تحریک ورودی، سیستم شناسایی شده و پایداری آن نیز تضمین می گردد. در ادامه آن عملکرد روش نوین ارائه شده با مقایسه گشتاورهای بدست آمده از مدل کامل با مدل کاهش یافته به صورت آفلاین و همچنین مدل تنظیم آنلاین پارامترهای اینرسی پایه به همراه شناسایی در حالت ورودی با درجه تحریک پایین تحقیق و نشان داده شده است. در انتها الگوریتمهای کنترلی جهت کنترل رباتهای موازی دلتای 3 و 4 ارائه شده. کنترلرهای طراحی شده متشکل از کنترلر PID با فیلتر پایین گذر، کنترلر تطبیقی و کنترلر مود لغزشی می باشد. سپس عملکرد این کنترلرها بر مدلهای ربات دلتای 3 و 4 ساخته شده توسط نرم افزار سیم مکانیک متلب بررسی شده و توسط معیار مجذور میانگین مربعات خطای ردیابی با یکدیگر مقایسه می شوند. سپس کنترلرهای طراحی شده به صورت عملی بر رباتهای دلتای 3 و 4 درجه آزادی آزمایشگاه تعامل انسان و ربات دانشگاه تهران پیاده سازی شده و پیرامون نتایج آنها بحث شده است.
پژوهشگران
فراز عابد آزاد
کلمات کلیدی
ربات موازی، شناسایی سیستم، ربات دلتا، مدلسازی دینامیکی، مدل سازی سینماتیکی
توضیحات
مهمترین چالش در رابطه با رباتهای موازی، استخراج مدل دینامیکی ساده از ربات است. روشهای سیستماتیکی که تا کنون برای استخراج مدل دینامیکی رباتهای موازی مورد استفاده قرار گرفتهاست، به مدلهایی منتهی شدهاست که بسیار پیچیدهاند و در کاربرد قدرت چندانی ندارند. مدلهای دینامیکی و سینماتیکی موجود برای ربات دلتا بسیار غیرخطی و پیچیده است. دینامیک رباتهای دلتا به روشهای مختلفی از جمله روش لاگرانژ، روش نیوتن-اویلر و روش کار مجازی قابل دستیابی است. به دلیل پیچیده بودن حل سینماتیک مستقیم ربات، روش تحلیل مستقیم دینامیک (نیوتن-اویلر) مناسب نیست. بنابراین روشهایی همچون تئوری پیچه روشی مناسبتر برای تحلیل دینامیک ربات دلتا است.
در این پروژه ابتدا معادلات سینماتیکی و دینامیکی سیستم و ماتریسهای ژاکوبین ربات که نگاشتی بین فضای زاویهای و فضای خطی حوزه دسترسی ربات است بدست میآیند. با توجه به کارهای پیشین صورت گرفته در آزمایشگاه تعامل انسان و ربات، با استفاده از روش کار مجازی و تئوری پیچ، مدلی برای ربات بدست آمدهاست. پارامترهای دینامیکی قسمتهای مختلف ربات از جمله پارامترهای موتور و پارامترهای هندسی با استفاده از روش پارامترهای اینرسی پایه بدست آمدهاست. با مشخص بودن پارامترهای اینرسی جعبهدنده و پارامترهای ثابت معادله اصطکاک خشک و ویسکوز که در این روش استفادهشده است. همچنین با توجه به اثر غالب دینامیک موتور الکتریکی، جعبهدنده و اصطکاک در دینامیک کلی سیستم، مدلی برای این مجموعه محرکه ربات نیز در نظر گرفته شده است. در مبحث مدل سازی دینامیکی ربات با استفاده از تئوری پیچه، پارامترهای اینرسی ربات به نحوی در نظر گرفته شدهاند که مدل دینامیکی استخراج شده، نسبت به این پارامترها خطی است. بدین ترتیب، میتوان با استفاده از روشهای مرسوم شناسایی سیستم همچون تخمین حداقل مربعات، پارامترهای مدل را شناسایی کرد.
پس از شناسایی و مدلسازی موفق مجموعه محرکها و ربات، الگوریتمهای کنترلی کلاسیک و هوشمند بر روی ربات پیادهسازی میشود. در این قسمت، با توجه به مدل و پارامترهای بدست آمده از ربات، کنترل کنندههایی دینامیکی همچون کنترل گشتاور محاسباتی، کنترل مد سطح لغزش، کنترل تطبیقی بر روی ربات شبیهسازی و اجرا گردید.
همچنین بخش مهمی از این پروژه، به راه اندازی و برنامهنویسی درایورهای موتورها اختصاص دارد، که این مهم، توانایی اجرای الگوریتمهای شبیهسازی شده را، در واقعیت و بر روی ربات میسر میکند.
همچنین به منظور کاهش نوسانهای مجری نهایی ربات، روش کاهش نوسان با استفاده از مفهوم طول مسیر فاز در شبیهسازی و عمل بر روی ربات پیادهسازی شدهاست. پس از انجام موارد فوق، الگوریتمهای بینایی ماشین به منظور تشخیص و انجام عملیات-گذاشت و برداشت هوشمند بر روی ربات پیادهسازی میشود. در ادامه، روشهای نوین کنترل بهویژه کنترل مبتنی بر داده و یادگیری تقویتی بر روی ربات مورد تحقیق و شبیهسازی قرار میگیرد.
پژوهشگران
سعید رحیمی
کلمات کلیدی
ربات موازی، کنترل هوشمند، شناسایی سیستم، پردازش تصویر، یادگیری عمیق، الگوریتم بهینه سازی، ربات دلتا، مدلسازی دینامیکی، مدلسازی سینماتیکی، شبکههای عصبی کانولوشن، یادگیری تقویتی
توضیحات
ربـات هـا نسـب بـه مـاشین ابـزارهـا نسـبت بـه کارایی قـابـل انـتظار ارزانـتر می بـاشـند، سـرعـت و انـعطاف پـذیري در آنـها فـوق الـعاده بـالا می بـاشـد و در بـرخی مـواد شـتاب در آنـها تـا چـند بـرابـر شـتاب گـرانـش می رسـد امـا دقـت و اسـتحکام در آنـها در مـقایسه بـا مـاشین ابـزار هـا هـنوز جـاي بـحث دارد. مـاشین ابـزارهـا فـوق الـعاده هسـتند امـا صـنایع حقیقتا نیازمـند ابـزاري انـعطاف پـذیرتـر، سـریع تـر و ارزان تـر می بـاشـند. دقـت مـاشین هـاي ابـزار کنونی در حـدود یک میکرون می بـاشـد. در ربـات هـاي تکرار پـذیري در محـدوده خـوبی قـرار داد امـا دقـت در مـوقعیت دهی در آنـها چـالشی بـحث انگیز میباشـد بـه طـوري که دقـت مـوقعیت در حـال حـاضـر در آنـها در محـدوده چـند میلیمتر میباشـد. بـراي افـزایش سفتی در ربـات هـا از ربـات هـاي مـوازي بـجاي ربـات هـاي سـري اسـتفاده شـده اسـت که بـا حـفظ انـعطاف پـذیري و سـرعـت بـالا، اسـتحکام در آنها افـزایش یافـته اسـت. ربـات هـاي مـوازي در تـئوري دقـت بـالایی دارنـد ولی در عـمل بـخاطـر وجـود مـفاصـل غیر فـعال دقـت هـاي در آنـها تـحت تـاثیر قـرار گـرفـته اسـت و راه حـل مـعمول بـراي افـزایش دقـت ربـات تـا میزان تکرار پـذیري، شـناسـایی وکالیبراسیون ربات می باشد.
رابـطه سینماتیک مسـتقیم ربـات هـاي مـوازي کامـلا غیر خـطی بـوده و عـمومـا راه حـل پـارامـتریک بـراي آنـها مـتصور نیست. راه حـلهاي عـددي نیز بـا مشکلاتی چـون عـدم هـمگرایی و یا سـرعـت کم در پـاسـخ گـویی مـواجـه هسـتند و راه حل های مبتنی بر الگوریتم های یاد گیری نیاز با چالش دیتا برداری و جواب غیر دقیق و ناپایدار مبتنی بر شبکه مواجه می باشد.
هدف در این تحقیق افزایش دقت و سرعت ربات موازی می باشد در اینجا ربات موازی سه درجه آزادی دلتا به عنوان ربات منتخب از نظر فضای کاری و سفتی مورد مطالعه قرار میگرد تلاش برای یافتن راه حلی تحلیلی و هندسی برای شناسایی فضای کاری و بهینه سازی ابعاد ربات بر اساس فضای کاری دلخواه صورت خواهد گرفت و سفتی ربات به صورت تحلیلی و هندسی حاصل خواهد شد زیرا راه حل حلهای تحلیلی قابل اعتماد ترین و سریع ترین راه حل خواهد بود و مشکلات راه حل های تحلیلی و یادگیری را نخواهند داشت اما در عین حال دستیابی به انها به راحتی امکان پذیر نخواهد بود. از الگوریتم های محاسبه شده برای بهینه ساری و طراحی بر اساس سفتی دلخواه استفاده خواهد شد که منجر به افزایش دقت ربات و در صورت کافی نبودن سفتی ربات از نظر سخت افزاری منجر به الگوریتم های جبران خطا خواهد شد.
از سویی در واقعیت خـطاي ربـات تـحت تـاثیر عـلل مـتفاوتی مـانـند تـلرنـسهاي ابـعادي سـاخـت، لقی مـفاصـل، سفتی ربـات و دیگر عـوامـل پیشبینی نشـده خـواهـد که در عمل اندازه گیری ان ناممکن خواهد بود در اینجا از الگوریتم های هوش مصنوعی برای جبران خطا محاسبات در تجربه واقعی استفاده خواهد شد. یکی از چـالـش هـاي کنونی کالیبراسیون ربـاتـها فـراهـم آوردن داده هـاي اولیه مـانـند مـوقعیت مـختصاتی مجـري نـهایی در شـرایط مـتفاوت می بـاشـد بـراي حـل این چـالـش یک راه حـل اپتیکی ارزان و بـرگـرفـته شـده از تکنیک هـاي اسـتریو ویژن مـعرفی خـواهـد شـد.
پژوهشگران
امیر هاشمی دستجردی
کلمات کلیدی
ربات موازی، پردازش تصویر، ربات دلتا، طراحی و ساخت ربات، مدلسازی سینماتیکی
توضیحات
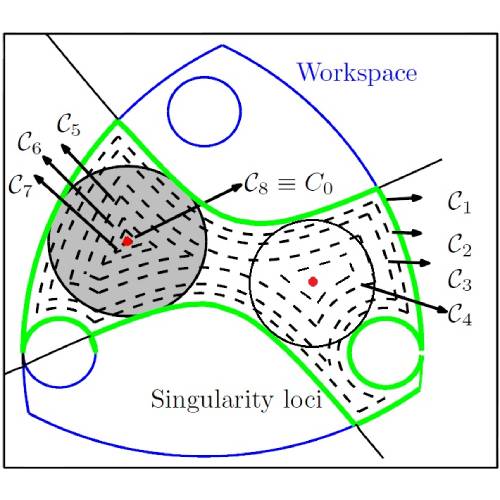
فضایکاری رباتهای موازی همراه با موقعیتهای تکینه است. این موقعیتها برای کنترل ربات مضر میباشند و تا حد امکان باید از این حالات دوری جست. روشهای متعددی در یافتن تکینگی و دوری از آن در ادبیات بیان شده است. بسیاری از این روشها کارآیی موردی دارند. در این پایاننامه ابتدا روشی نوین برای بدست آوردن تکینگی رباتهای موازی، با بهرهگیری از مفاهیم هندسی حاکم بر موقعیتهای تکینه و تئوری پیچه، معرفی میشود. سپس با رجوع به آنالیز بازهای، روش انشعاب و هرس برای یافتن فضایکاری رباتها ارائه میشود. فضایکاری و فضایمفصلی رباتهای سری دو درجه آزادی صفحهای با استفاده از الگوریتم انشعاب و هرس، به منظور درک بهتر این روش، بدست میآید. روشی نوین برای یافتن بزرگترین دایرهی عاری از تکینگی در فضایکاری رباتهای موازی، چه صفحهای مانند RPR و چه فضایی مانند UPS، به همراه الگوریتم و شبهکدهای مربوطه ارائه میشود. یافتن این فضایکاری گامی در جهت اطمینان از کارکرد رباتها و دوری از موقعیتهای تکینه است. با نشان دادن نتایج بدست آمده، استحکام و ارزش کار الگوریتم بررسی میشود. روشی دیگر، بر پایهی هندسه، که قابلیت پیادهسازی بر روی تقریبا هر معادلهی تکینگی، با هر درجه از پیچیدگی را دارد، معرفی میشود. در این روش وضعیتهای خاص که ممکن است در حل رخ دهد بررسی میشود و با ارائهی ناحیهی عاری از تکینگی ربات PRR، توانایی الگوریتم پیشنهادی سنجیده میشود. روشی دیگر، بر اساس الگوریتم جابجایی مرزها، برای یافتن مرکز بزرگترین دایرهی عاری از تکینگی در ناحیهی بدست آمده استفاده خواهد شد. روشی نوین بر پایهی آنالیز بازهای به منظور بهینهسازی ابعادی رباتها معرفی خواهد گردید و به منظور صحهگذاری بر توانایی آن، ابعاد هندسی ربات سه کابله صفحهای دارای فضایکاری کششممکن با هدف در بر گرفتن یک دایرهی از پیش تعیین شده، ارائه خواهد شد. سپس بزرگترین دایره برای ربات بهینه شده بدست خواهد آمد. در خلال این روش، روشی نوین برای یافتن مرزهای فضایکاری نیز ارائه میشود. در آخر روشی نوین برای یافتن فضایکاری عاری از تداخل در رباتهای موازی صفحهای با در نظر گرفتن حضور یک مانع پیشنهاد میشود. شایان ذکر است که بسیاری از روشهای ارائه شده در این پایاننامه قابل تعمیم به درجات آزادی بالاتر و سایر رباتها هستند.
پژوهشگران
محمدهادی فرزانه کلورزی
کلمات کلیدی
ربات موازی، بینایی ماشین، الگوریتم بهینه سازی، مسیریابی ربات، ربات دلتا، ربات چشم چابک دو درجه آزادی، ربات چشم چابک سه درجه آزادی، مدل سازی سینماتیکی
توضیحات
هدف پروژه، تعیین بزرگترین بیضی فضای کاری عاری از تکینگی ربات های موازی با استفاده از بهینه سازی محدب بوده است. در این روش، قیودنامحدب حاکم بر ربات های موازی، به صورت محدب درآورده شده است. همچنین، طراحی مکانیزم و طراحی مسیر برای این رباتها صورت گرفته است.
پژوهشگران
امیرحسین کریمی
کلمات کلیدی
ربات موازی، ربات کابلی، الگوریتم بهینه سازی، ربات Gough-Stewart، مدلسازی دینامیکی، مدلسازی سینماتیکی