

سال ساخت: —
اسم ربات: —
سازندگان: —
کاربرد ربات: —
توضیحات
لورم ایپسوم متن ساختگی با تولید سادگی نامفهوم از صنعت چاپ، و با استفاده از طراحان گرافیک است، چاپگرها و متون بلکه روزنامه و مجله در ستون و سطرآنچنان که لازم است، و برای شرایط فعلی تکنولوژی مورد نیاز، و کاربردهای متنوع با هدف بهبود ابزارهای کاربردی می باشد، کتابهای زیادی در شصت و سه درصد گذشته حال و آینده، شناخت فراوان جامعه و متخصصان را می طلبد، تا با نرم افزارها شناخت بیشتری را برای طراحان رایانه ای علی الخصوص طراحان خلاقی، و فرهنگ پیشرو در زبان فارسی ایجاد کرد، در این صورت می توان امید داشت که تمام و دشواری موجود در ارائه راهکارها، و شرایط سخت تایپ به پایان رسد و زمان مورد نیاز شامل حروفچینی دستاوردهای اصلی، و جوابگوی سوالات پیوسته اهل دنیای موجود طراحی اساسا مورد استفاده قرار گیرد.لورم ایپسوم متن ساختگی با تولید سادگی نامفهوم از صنعت چاپ، و با استفاده از طراحان گرافیک است، چاپگرها و متون بلکه روزنامه و مجله در ستون و سطرآنچنان که لازم است، و برای شرایط فعلی تکنولوژی مورد نیاز، و کاربردهای متنوع با هدف بهبود ابزارهای کاربردی می باشد، کتابهای زیادی در شصت و سه درصد گذشته حال و آینده، شناخت فراوان جامعه و متخصصان را می طلبد، تا با نرم افزارها شناخت بیشتری را برای طراحان رایانه ای علی الخصوص طراحان خلاقی، و فرهنگ پیشرو در زبان فارسی ایجاد کرد، در این صورت می توان امید داشت که تمام و دشواری موجود در ارائه راهکارها، و شرایط سخت تایپ به پایان رسد و زمان مورد نیاز شامل حروفچینی دستاوردهای اصلی، و جوابگوی سوالات پیوسته اهل دنیای موجود طراحی اساسا مورد استفاده قرار گیرد.
توضیحات
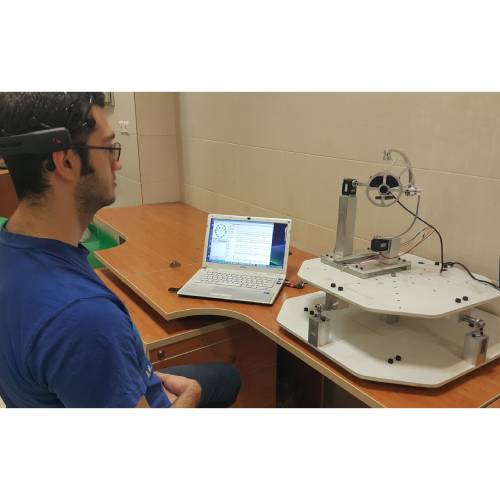
این پروژه در راستای طرح پژوهشی “ساخت ربات واسط مغز و ماشین برای شبیه سازی حرکت گردن و چشم انسان با استفاده از سیگنالهای مغز” که حمایت شده از طرف صندوق حمایت از پژوهشگران و فناوران کشور (INSF) است، می باشد. این طرح به منظور شبیه سازی حرکات سر انسان یعنی حرکت گردن و چشم ها، با هدف تعامل انسان و ربات و به منظور کمک به افراد مبتلا به بیماریهایی نظیر اوتیسم یا اسکلروز جانبی آمیوتروفیک تعریف شده است. بیماران اوتیسمی به مرور توانایی برقراری ارتباط با محیط اطراف خود را از دست میدهند. به منظور کاهش سرعت پیشرفت این بیماری این افراد نیاز به کار درمانی و تمرین مداوم دارند که با کمک چنین سیستمی می توان کمک بزرگی به این افراد نمود تا بتوانند با محیط اطراف خود ارتباط برقرار نمایند. همچنین از دیگر فواید این طرح کمک به افراد مبتلا به اسکلروز جانبی آمیوتروفیک می باشد که به مرور توانایی حرکت اعضای بدن خود را از دست می دهند و با کمک حرکت سر و یا چشم خود می توانند کارهایی نظیر حرکت دادن صندلی چرخدار خود را بدون کمک دیگران انجام دهند.
در این پایاننامه هدف استفاده از حرکت چشم برای کنترل یک ربات موازی کروی دو درجه آزادی میباشد تا به کمک آن افراد معلولی که فقط توانایی حرکت چشم خود را دارند بتوانند با کمک حرکت چشمانشان یک ربات را حرکت دهند. این ربات میتواند یک وسیله ساده مانند صندلی چرخدار و یا وسایل پیچیدهتر مانند نشانگر موس یا اندامهای مصنوعی باشد. در ابتدا به بررسی ربات چشم چابک از نظر سینماتیکی و دینامیکی پرداخته می شود و پس از بررسی دقیق رفتار ربات در فضای کاری آن و نیز وضعیتهای تکینه ربات و نیز نشان دادن درستی حل معادلات سینماتیکی و دینامیکی صورت گرفته به کمک ابزار SimMechanics اقدام به ساخت ربات دیگری میشود که نسبت به ربات حاضر، دارای سختی بیشتر و همچنین فضای کاری بزرگتری میباشد. سپس به منظور شبیه سازی حرکت چشمها، از سیگنالهای الکتروانسفالوگرام استفاده خواهد شد، به این صورت که در ابتدا سیگنالهای مغز فرد را به کمک هدست Emotiv جمع آوری کرده و پس از تحلیل و بررسی این سیگنالها و تشخیص حرکت چشم به کمک روش های مختلف مانند پنجره متحره، تبدیل سریع فوریه و نیز شبکه عصبی، این سیگنالها به ربات چشم چابک دو درجه آزادی منتقل میگردند تا حرکت چشم بر روی آن شبیه سازی گردد.
استفاده از تئوری پیچه به منظور حل معادلات سینماتیکی و دینامیکی ربات و نیز به کار بردن معیارهای کینتواستاتیک نظیر حرکت پذیری و نیز عدد وضعیت به منظور بررسی سینماتیک ربات و نیز تکینگی های آن و همچنین به کارگیری شبکه عصبی پرسپترون چند لایه به منظور شناسایی پلک زدن و حرکت چشم و نیز شبیه سازی آن ها بر روی ربات موازی کروی دو درجه آزادی از جمله نوآوریهای این پایاننامه میباشد.
پژوهشگران
بهزاد دانایی، آلاله آرین
کلمات کلیدی
ربات موازی، ربات چشم چابک دو درجه آزادی، طراحی و ساخت ربات، مدلسازی دینامیکی، مدلسازی سینماتیکی
به زودی این بخش تکمیل خواهد شد.
