سال ساخت: —
اسم ربات: —
سازندگان: —
کاربرد ربات: —
توضیحات
برای یک ربات سه درجه آزادی به پیاده سازی مکانیزم کارکرد چشم این ربات پرداخته و اصول کنترلی و طراحی این مکانیزم برای تقلید حرکات چشم فرد رو به روی آن پیاده میشود. اخیراً در یکی دیگر از تحقیقات انجام گرفته از دوربین دید سه به منظور دریافت حرکات انسان استفاده شده، بدین منظور از این روش و با استفاده از روشی که شرح داده شده به پیاده سازی تقلید حرکات چشم انسان برای ربات پرداخته ایم و از مفاهیم پردازش تصویر در این زمینه یاری جسته ایم. همچنین روشی کارآمد به منظور نگاشت حرکات انسان به ربات انجام گردیده است، که در این پروژه با استفاده از منابع موجود به پیاده سازی تقلید چشم می پردازیم. این پروژه همچنین با استفاده از مفاهیم پردازش تصویر و یادگیری ماشین پیاده میشود
هدف ایجاد یک تعامل واقعی بین یک انسان و ربات میباشد و ضرورت آن هم استفاده از ربات در مکان هایی است که امکان حضور انسان نمی باشد ، برای چنین استفاده ای نیاز به تعامل انسان و ربات میباشد که هدف نهایی پروژه نیز همین میباشد.
روش های گوناگونی برای انجام پروژه موجود است که ابتدا به طراحی مکانیکی آن پرداخته و مراحل شبیه سازی مکانیکی را انجام داده و سپس به مرحله ساخت میرسیم و پس از ساخت به کنترل آن میپردازیم و با استفاده از دوربین به آن فیدبک کنترل میدهیم وسپس بااستفاده از این فیدبک و کنترلر مناسب سیستم را کنترل کرده وبه واسطه دوربین دید سه بعدی که توسط بسته نرم افزاری سیستم عامل ربات (راس) راه اندازی میشود، دریافت میگردد. با توجه به اختلاف ابعادی میان انسان و ربات، حرکات دریافتی به ابعاد ربات نگاشت میشود. بعد از اعمال نگاشت،حل سینماتیک مستقیم و معکوس ربات ارائه میگردد در نهایت به پیاده سازی تقلید ربات ازچشم انسان پرداخته و قسمت های کد نویسی را تکمیل کرده. و مرحله تقلید چشم انسان توسط ربات را پیاده میکنیم.
توضیحات
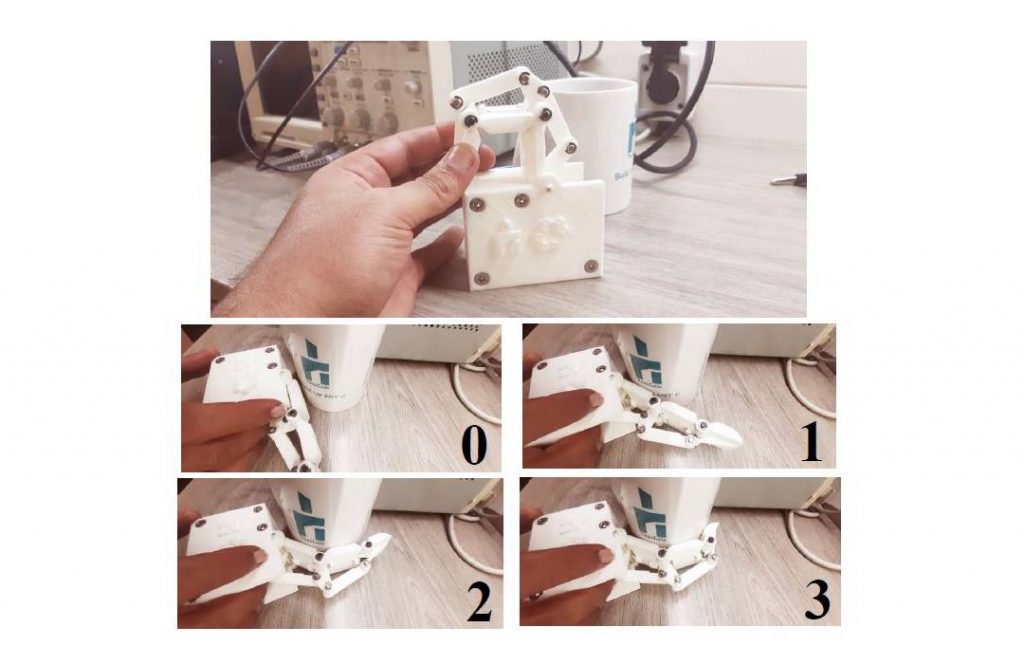
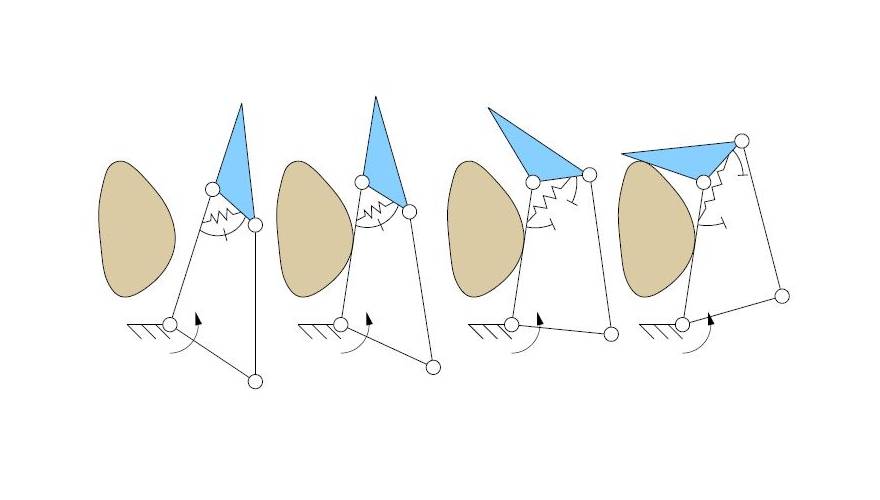
ابتدا به بررسی اصول طراحی و ساخت انگشت رباتیک سه بندی با عملگر کمتر پرداخته شده است. این انگشت دارای دو مکانیزم مجزاست، یکی مکانیزم بند های متصل به هم و دیگری مکانیزم انتقال در پشت بند ها. هدف از طراحی در این قسمت طراحی مکانیزم انتقال است. طبق مقالات پیشینه تحقیق این مکانیزم به صورت های متفاوتی ساخته میشود. در همه این الگو ها یک سری اصل باید رعایت شوند. همچنین از میان ترکیب های بسیار زیادی که می توان به عنوان مکانیزم انتقال این انگشت به کار برد برخی از آن ها توسط نویسندگان به بهتر بودن نسبت به بقیه مشهور شده است. البته طبق گفته لیونل بیرگلن که از سرامدان این عرصه و نویسنده کتاب ” دست رباتیک با عملگر کمتر” می باشد، نمیتوان بهترین سازه را انتخاب کرد. اما میتوان سازه های مبتنی بر بیشترین نیرو و کمترین فضای اشغالی و بیشترین فضای کاری را با توجه به ادبیات تحقیق و همچنین کار های ایشان به عنوان مکانیزم انتخابی انگشت انتخاب کرد. این مبحث در پایان نامه به صورت کاملا جزیی اشاره شده است. در ادامه پس از انتخاب نوع مکانیزم به بررسی روابط هندسی برای طراحی بهینه آن پرداخته شده است. این روابط هندسی مبنی و اساس اصول سه گانه بیشترین نیروی انتقالی، کمترین فضای اشغالی و همچنین بیشترین فضای کاریست که در اینجا به طور کامل محاسبه و اعمال شده است. از میان هزاران ساختار انگشت رباتیک خود تطبیق بر مبنی اصول و تجربه های گذشته یک ساختار انتخاب شده است. محل اعمال عملگر و عناصر منفعل در این ساختار با استفاده از تجربه گذشته و ماتریس انتخاب ارائه شده در مقاله بیرگلن انتخاب شده است. سپس برخی اصول ساخت و همچنین طرح های معیوب ودلایل آن بیان شده است. سازه جدیدی با توجه به حرکت انگشت شست برای این انگشت تعبیه و به تحلیل آن پرداخته شده است در قسمت آخر به بیان ساخت این انگشت پرداخته شده است. در این قسمت روش ساخت با پرینتر سه بعدی توضیح داده شده و روش های مستند علمی در بهبود کیفیت قطعات و مفاصل و تلرانس ها بیان شده است. این انگشت یکی از انگشت های چهار گانه می باشد، هم اکنون در حال طراحی و ساخت سنسور و نصب آن بر روی انگشت ساخته شده و اعمال کنترلر هستند.
پژوهشگران
محمدامین داوری
کلمات کلیدی
دست رباتیک، کم عملگری، گرفتن، طراحی، گرفتن تطبیقی

توضیحات
در این پروژه هدف بررسی تشخیص نحوهی برداشت رباتیکی اجسام به کمک سیستمهای هوشمند است. از آنجا که سال روشهای مبتنی بر الگوریتمهای تحلیلی در حوزه برداشت رباتیکی مورد استفاده واقع شدهبودند لیکن این الگوریتمها با محدودیت جدی روبرو بودهاند که از مهمترین آنها عدم توانایی برداشت اجسام دیده نشده بود. چرا که عملیات برداشت در روشهای تحلیلی با مفروض دانستن کل یا حدود مدل جسم انجام میشود. با پیشرفتهای چشمگیری که در سالهای اخیر در حوزه یادگیری عمیق در بینایی ماشین صورت پذیرفته، رویکردهای مناسبی برای این مساله بهوجود آمده است. رویکردهایی که در عین پردازش بلادرنگ توانایی کشف برداشت مناسب را نیز دارا هستند. بدین منظور در دو حوزه برداشت دو و سه بعدی به کمک گیره رباتیکی دو یا چند انگشتی به ارائه نوآوریهای مورد استفاده برای مرتفع سازی این نیازها پرداخته شدهاست. در حوزه تشخیص نحوهی برداشت دو بعدی به معرفی روشهایی به منظور بهبود دقت تشخیصی و شناسایی بهترین مکان تشخیصی از میان کاندیداهای مختلف برداشت با توجه به کمینگی نیروی برداشت و تناسب با هدف خاص رباتیکی پرداخته شده است.در روشهای تشخیصی برداشت سه بعدی نیز نیز با هدف افزایش دقت تشخیصی، کاهش نیروی برداشت و متناسب سازی تشخیص نحوهی برداشت با هدف خاص رباتیکی اقدام به ارائه ایده در این بخش شده است. در این بخش پس از پیش پردازش دادههای ورودی اقدام به تولید انواع جدید نمایشی چون ابر نقاط، مش و وکسل به منظور افزایش اطلاعات مورد نیاز برای برداشت شده است. سپس در بخش تشخیص نحوهی برداشت رباتیکی که عمده نوآوریهای این بخش در آن نهفته است در دو حوزه مستقیم و مبتنی بر تجزیه جسم به اشکال پایه آن اقدام به تشخیص نحوهی برداشت مناسب شدهاست. برای تجزیه جسم به اشکال پایهای آن از روی تصاویر رنگی و عمقی مدلی ترکیبی از اطلاعات رنگی و عمقی برای قسمت بندی پیشنهاد شدهاست. همچنین برای قسمت بندی و تطبیق سطح از روی ابرنقاط جسم روشهای بدون نظارت و با نظارت ارائه گردیدهاست. برای کمک به قسمت بندی چه از روی ابر نقاط و چه تصاویر، غنی سازی دادههای آموزشی کمککننده است لذا مدلی به کمک شبکههای مولد رقابتی برای تولید مجموعه داده حاوی تصاویر و تجزیه آن به اشکال پایه ارائه گردیدهاست. در انتها برای رتبهبندی برداشتهای مناسب از شناسایی مرکز جرم، جنس و تطابق با هدف رباتیکی بهره جسته شدهاست. ممکن است برخی از دادههای مورد نیاز در دسترس قرار نداشته و یا به کلی وجود نداشته باشند برای این منظور و همچنین غنیسازی دادگان پیشنهاد دستگاهی برای جمعآوری مجموعه داده مناسب برداشت رباتیکی ارائه گردیده است.
پژوهشگران
حامد حسینی
کلمات کلیدی
دست های رباتیکی (Grasping)، کنترل هوشمند، بینایی ماشین، یادگیری عمیق، حسگر نیرو/گشتاور، مسیریابی ربات، شبکههای عصبی کانولوشن

<strong>توضیحات</strong><p>هدف از انجام این پروژه شناسایی محل grasp در اجسام مختلف توسط بازوی محرک ربات است به نحوی که بتواند به نحو مطلوبی آنرا گرفته و بلند کند. در این رابطه شکل جسم و شرایط آن در هر سه بعد قابل اهمیت است که به همین جهت نیازمند مدل سازی سه بعدی از آن هستیم. دیتاست های موجود در این زمینه دارای نواقصی هستند بنابراین برای رفع آن ها در ابتدای امر میبایست دیتاست مناسب جهت انجام این فعالیت جمع آوری می گردید. بدین منظور به جهت افزایش کیفیت و سرعت از ترکیبی از ربات دلتا و دستگاه camera stablizer استفاده گردیده است. بدین ترتیب که با اتصال این دو بهم و چرخش دوربین به دور جسم دیتای مناسب تهیه گردیده و به دنبال آن با استفاده از نرم افزار های موجود این دیتاهای جمع آوری شده به مدل سه بعدی هر جسم تبدیل گردد. سپس میبایستی با روشی مناسب محل های گرفتن در مدل ها نشانه گذاری گردد که این نشانه گذاری خود میتواند به روش های مختلف صورت گیرد مثل استفاده از دستکش مخصوص یا رنگ متفاوت در محل های قرار گرفتن گیرنده. در ادامه با استفاده از مدل سازی کلی جسم به وسیله ی اشکال پایه، روش های پردازش تصویر و یادگیری شبکه های عصبی و با کمک روش های یادگیری تعاملی عمل یادگیری مد نظر صورت گرفته و در نهایت ربات بتواند با مشاهده ی جسم نقاط مناسب جهت گرفتن را شناسایی کرده و به وسیله ی بازوهای خود و gripper های مربوطه آنرا grasp نماید.</p>
<strong>پژوهشگران</strong><p>حسین قاسمی</p>
<strong>کلمات کلیدی</strong><p>ربات موازی، دستهای رباتیکی (Grasping)، پردازش تصویر، یادگیری عمیق، ربات دلتا، شبکههای عصبی کانولوشن، یادگیری تقویتی</p>
به زودی این بخش تکمیل خواهد شد.