

سال ساخت: —
اسم ربات: —
سازندگان: —
کاربرد ربات: —
توضیحات
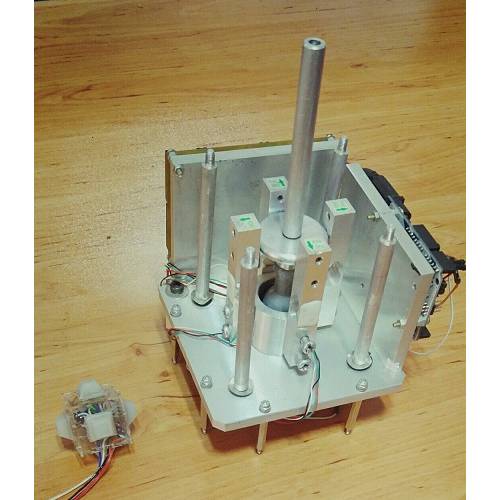
این پایاننامه به طراحی و ساخت یک حسگر لمسی به همراه پیادهسازی آن بر روی یک ربات موازی سه درجه آزادی مستقل با هدف تعامل انسان و ربات، میپردازد. حسگر مورد نظر هگزاتکتایل نام دارد که شامل شش عدد آرایه لمسی نرم از نوع بارمتری است که توسط لایهای از سیلیکون به شکل هرم ناقص پوشانده شدهاند. هگزاتکتایل شامل شش عدد واحد لمسی نرم و بسیار دقیق و حساس است که در شش وجه یک مکعب قرار داده شدهاند و به این ترتیب امکان سنجش نیرو در سه محور x، y و z مهیا شده است. از جمله مزایای این حسگر میتوان به حساسیت بالا، خطی بودن، قیمت کم و نویز کم اشاره کرد. دقت این حسگر 0.01 نیوتن و رنج آن حدود 4 نیوتن بوده که در کنار شکل ظاهریای که دارد برای قرار دادن روی مجری نهایی ربات با هدف تعامل انسان و ربات مناسب است.
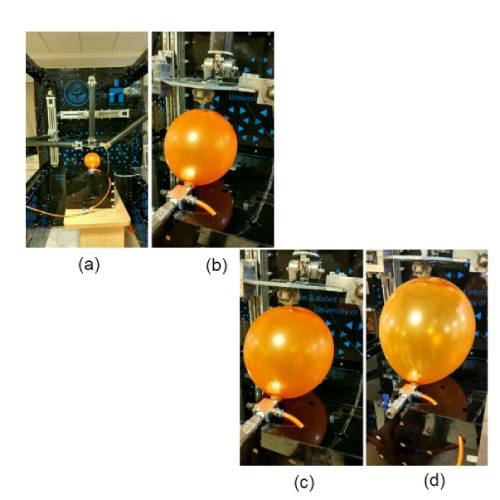
در بخش بعد موضوع تعامل انسان و ربات مورد بررسی قرار گرفته است. بدین منظور از روش کنترل ادمیتانس که یکی از رایجترین روشها در موضوع تعامل انسان و ربات است استفاده شده است. ابتدا روش کنترل ادمیتانس با ضرایب ثابت مورد بررسی قرار گرفت و ضمن بررسی مشکلات آن، روش ادمیتانس کنترل فعال بر پایه سرعت به عنوان راهحل انتخاب شد.
توضیحات
این پایاننامه به طراحی و ساخت یک حسگر لمسی به همراه پیادهسازی آن بر روی یک ربات موازی سه درجه آزادی مستقل با هدف تعامل انسان و ربات، میپردازد. حسگر مورد نظر هگزاتکتایل نام دارد که شامل شش عدد آرایه لمسی نرم از نوع بارمتری است که توسط لایهای از سیلیکون به شکل هرم ناقص پوشانده شدهاند. هگزاتکتایل شامل شش عدد واحد لمسی نرم و بسیار دقیق و حساس است که در شش وجه یک مکعب قرار داده شدهاند و به این ترتیب امکان سنجش نیرو در سه محور x، y و z مهیا شده است. از جمله مزایای این حسگر میتوان به حساسیت بالا، خطی بودن، قیمت کم و نویز کم اشاره کرد. دقت این حسگر 0.01 نیوتن و رنج آن حدود 4 نیوتن بوده که در کنار شکل ظاهریای که دارد برای قرار دادن روی مجری نهایی ربات با هدف تعامل انسان و ربات مناسب است.
در بخش بعد موضوع تعامل انسان و ربات مورد بررسی قرار گرفته است. بدین منظور از روش کنترل ادمیتانس که یکی از رایجترین روشها در موضوع تعامل انسان و ربات است استفاده شده است. ابتدا روش کنترل ادمیتانس با ضرایب ثابت مورد بررسی قرار گرفت و ضمن بررسی مشکلات آن، روش ادمیتانس کنترل فعال بر پایه سرعت به عنوان راهحل انتخاب شد.
پژوهشگران
امین حامد، تریفا مرجانی
کلمات کلیدی
حسگر لمسی نرم، بارومتر، کنترل ادمیتانس فعال، تعامل انسان و ربات
توضیحات
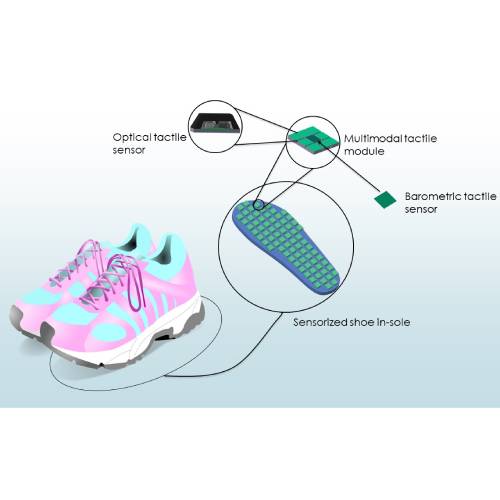
حسگرهای لمسی در دو دهه گذشته به دلیل پتانسیل آن در بسیاری از کاربردها ، مورد توجه بسیاری قرار گرفته اند. با الهام از پوست انسان ، آنها به عنوان پوست مصنوعی استفاده می شوند تا ربات ها را قادر به تعامل با محیط خود با ارائه اطلاعات مربوطه مانند فشار ، موقعیت ، شکل هندسی ، بافت ، دما و سختی جسم کنند. با نصب پوستی هوشمند بر روی قسمت های مختلف ربات ، می توانیم از تعامل ایمن انسان و ربات و کارهای گراسپینگ بدون آسیب رساندن به جسمی که در دست گرفته است اطمینان حاصل کنیم. یکی دیگر از موارد معمول استفاده در حسگرهای لمسی ، کاربردهای پزشکی مانند کفش های هوشمند است. از کفش های هوشمند می توان برای نظارت بر سلامت شخصی استفاده کرد ، جایی که می توان از طریق اندازه گیری فشار کف پا و تحلیل راه رفتن و استقرار ، سلامت فرد را در محل کار یا خانه کنترل کرد. این می تواند به تشخیص زود هنگام مشکلات سلامتی کمک کند و هزینه های درمان را کاهش دهد. علاوه بر این ، می توان از سنسورهای لمسی برای شناخت اشیا استفاده کرد.
با توجه به موارد ذکر شده، این پروژه به طراحی و توسعه یک سنسور لمسی برای استفاده در کفش های هوشمند و کاربردهای مختلف می¬پردازد. چندین فناوری برای ساخت سنسور لمسی وجود دارد. ما سه روش مختلف را برای انجام این کار پیشنهاد می دهیم. ابتدا سنسور فشار نوری طراحی و ساخته می شود. آرایه ای از این سنسور برای اندازه گیری فشار کف پا در نقاط مختلف کف پا روی کفی کفش نصب می¬شود. استفاده از حسگر فشار نوری مزایای بسیاری دارد از جمله کم هزینه بودن ، مقاومت در برابر دما و ساخت آسان. دوم ، ما یک ماژول لمسی ترکیبی را ارائه می دهیم که از پوست انسان الهام گرفته شده است. پوست ما از انواع مختلف حسگرهای لمسی تشکیل شده است. ماژول پیشنهادی از چندین سنسور فشار نوری و سنسور فشار بارومتری با تنظیمات مختلف تشکیل می¬شود. ما می خواهیم این پیکربندی ها را آزمایش کنیم تا از این بین ، طرح بهینه را انتخاب کنیم. یکی از مزایای استفاده از سنسورهای لمسی ترکیبی که با توجه به اینکه هر سنسور مستقل محدودیت های خاص خود را دارد با ترکیب چندین فناوری می توانیم این اشکالات را برطرف کنیم. مزیت دیگر این است که تفسیر دقیق و محکم تری از داده های جمع آوری شده داشته باشیم. این ماژول سنجش نیز در کفش ها و سایر کاربردها اجرا می شود. روش دیگر برای ماژول لمسی چند حالته با افزودن لایه دیگری در بالا یا زیر ماژول روش قبلی است. پس از نصب این سنسورهای مختلف در کفش ، یک مجموعه داده از نمونه بیماران و افراد سالم جمع آوری و تحلیل می شود و سپس از روشهای یادگیری ماشین مانند شبکه های عصبی مصنوعی ، ماشین بردار پشتیبان SVM و سایر موارد برای طبقه بندی و تصمیم گیری در موارد ناشناخته استفاده می شود.
پژوهشگران
نجلا نفیله
کلمات کلیدی
شناسایی سیستم، یادگیری عمیق، حسگر نیرو/گشتاور، پوستهای رباتیکی، شبکههای عصبی کانولوشن
به زودی این بخش تکمیل خواهد شد.
