سال ساخت: 1394 تا به امروز ادامه دارد.
اسم سیستم: حسگر نیرو
سازندگان: محمدشریف زاده، دانیال موسوی و آرمان بیرانوند
کاربرد سیستم: اندازه گیری نیرو برای تعامل انسان با ربات
توضیحات
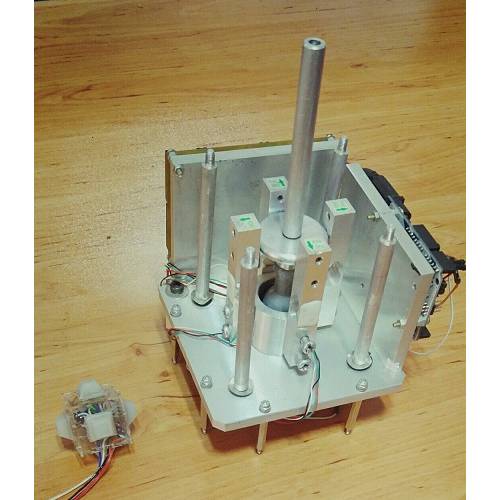
اندازه گیری و کنترل نیرو نقش اساسی را برای دستیابی به یک کنترل تعاملی هوشمند و ایمن بازی می کند. در نتیجه می توان برای ایجاد یک کنترل تعاملی ایمن بین ربات و محیط (دست انسان) از حسگرهای نیروی چند محوره استفاده کرد. توسط این روش می توان کنترل پیچیده تر را برای سیستم رباتیکی طراحی و پیاده سازی کرد. در آزمایشگاه تعامل انسان و ربات سه نسل از حسگر های نیروی صلب چند محوره طراحی و ساخته شده است. نسل اول حسگر نیروی چند محوره، توسط آقای محمد شریف زاده طراحی و ساخته شده است که با استفاده از لودسل میزان نیروی وارد به محور های مختلف را اندازه گیری می کند. این حسگر دارای دقت 0.1 نیوتن در محور های x و y و دقت 0.2 نیوتن در محور z می باشد که با دارا بودن بازه ی 5 نیوتنی اندازه گیری برای کاربرد های تعاملی مناسب می باشد. نسل دوم و سوم حسگر نیروی چند محوره، توسط آقایان دانییال موسوی و آرمان بیرانوند با استفاده از خواص مغناطیسی برای دستیابی به دقت و حساسیت بالاتر و هزینه ی کمتر ساخته شد. این دو نسل که کارکرد آن مبتنی بر اثر هال می باشد، توانایی اندازه گیری نیرو در سه محور به صورت وابسته در نسل دوم و به صورت مستقل در نسل سوم را دارا بوده و نسل سوم حسگر نیرو دارای تفکیک پذیری 0.002 و 0.001 نیوتن در محور x، y و دقت 0.2 نیوتن در محور z می باشد. در حال حاضر در آزمایشگاه تعامل انسان و ربات ساخت حسگرهای نیروی ادامه دارد و نسل های جدیدی از این حسگرهای در حال بررسی و توسعه می باشند. هدف اصلی در ساخت این توع حسگرها استفاده از آنها در عملبات های تعاملی انسان با ربات می باشد.
توضیحات
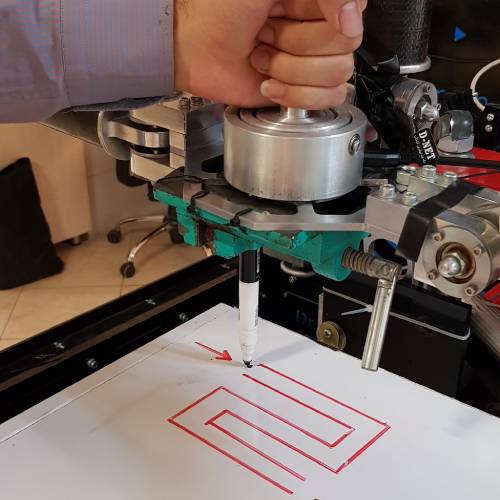
در این حسگر، ساختار بهگونهای است که سنجش نیرو در هرکدام از محورها، توسط دو حسگر اثر هال و بهطور تفاضلی انجام میگیرد و درنتیجه برخلاف دیگر حسگر ها که تشخیص جهت چالشی بزرگ بود، این حسگر با ساختار مناسب و هوشمندانه خود این چالش را حل نموده و توانایی سنجش خروجیهای هر محور را بهطور مستقل را دار است. با توجه به این ساختار، خطی پذیری در این حسگر به مزیتهای این حسگر افزوده و نیروی اعمالشده به حسگر در نقطه مؤثر حسگر به راحتترین شکل ممکن قابلاندازهگیری است. با فرض صلبیت در اندازهگیریها و درنظرگرفتن کلیه ویژگیهای حسگر و ساختار مناسب آن، کالیبراسیون این نسل بسیار آسان بوده و تنها کافیست برای کالیبراسیون هر یک از محورها، نیروی مرجع به محور موردنظر اعمال گردد و خروجی حسگر نیز دریافت گردد و درنتیجه کالیبراسیون حسگر بدین ترتیب انجام میشود. همچنین لازم به ذکر است در کالیبراسیون این حسگر از یک حسگر تکمحوره و یک پیچ انتقال قدرت بهمنظور ایجاد نیروی مرجع موردنظر و قابلاندازهگیری بهصورت دیجیتال استفادهشده است. از این نوع حسگر می توان در کاربرد های صنعتی و آزمایشگاهی بهره برد. حسگر ارائه شده، می تواند بر روی مجری نهایی ربات ها متصل شده و نیروی اعمالی به محیط توسط ربات را اندازه گیری کند. این کاربرد می تواند قابلیت کنترل نیرو و یا کنترل امپدانس در ربات ها را به وجود آورده و در کابرد های تعاملی بین ربات و محیط و مخصوصا انسان به کار برود. کاربرد این حسگر ها در حوزه ی صنعت می تواند در سنجش برخورد، فشار و نیرو به هر جسمی در نقطه ای خاص باشد. وظیفه ی اصلی حسگر طراحی و ساخته شده، کابرد آن در حوزه ی رباتیک و به کارگیری آن در مجری نهایی ربات می باشد، که می تواند یک رابطه ی نیرویی با محیط را برقرار کند و درک ربات را نسبت به محیط ناشناخته ی خود بالا ببرد.
پژوهشگران
دانیال موسوی، آرمان بیرانوند، محمد شریفزاده
کلمات کلیدی
حسگر نیروی چند محوره، حسگر نیرو، تعامل انسان و ربات
به زودی این بخش تکمیل خواهد شد.
به زودی این بخش تکمیل خواهد شد.