سال ساخت: —
اسم ربات: —
سازندگان: —
کاربرد ربات: —
توضیحات
این بازوی رباتیک جهت توانبخشی افرادی که به دلیل ضعف ماهیچه ای قادر به حرکت دست خود یا با جابجایی اشیا نمی باشند، طراحی شده است. این بازوی رباتیک برای کمک در فعالیت های روزمره مانند غذا خوردن به افراد کم توان و نیز در تمرین های فیزیوتراپی برای افرادی که قدرت بازوی آن ها تحلیل رفته است، مورد استفاده قرار می گیرد. قابلیت تنظیم دستی که در نمونه سه درجه آزادی دستگاه اضافه شده است، این امکان را به اشخاص و درمانگران می دهد تا در طول دوره درمان به مرور سهم دستگاه از نیروی وارده برای حرکت دست را کاهش داده تا به مرور شخص بتواند دست خود را به تنهایی بدون کمک دستگاه حرکت دهد.
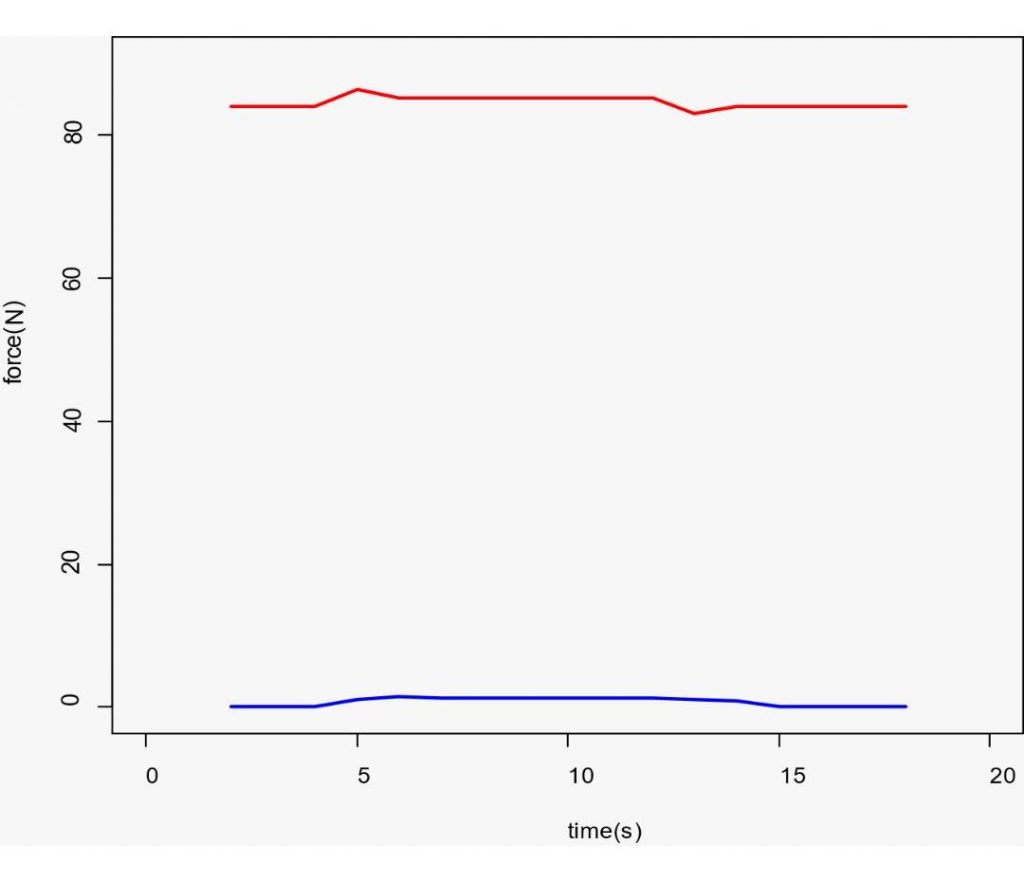
بازوی رباتیک توانبخشی با اعمال گشتاور معکوس به دست شخص کم توان و خنثی کردن وزن دست، باعث می شود که شخص بتواند دست خود را حرکت دهد. در این بازو از سنسور پوست رباتیک برای تشخیص وزن مجموعه دست و چیزی که در دست گرفته شده، استفاده شده است. از مزایای این سنسور نسبت به سنسور های متداول بازار مقاومت به ضربه بالاتر ونیز بخش خارجی از جنس سیلیکون می بیاشد که ماده ای نرم بوده و درصورت اصابت دست شخص به این سنسور فرد صدمه ای نمی بیند. با قرار گرفتن دست بر روی سنسور، وزن دست و هر آنچه در دست گرفته شده، توسط سنسور اندازه گیری می شود. سپس ضدوزنه شروع به حرکت می کند و از محور دوران بازو فاصله می گیرد تا زمانی که گشتاور وارد شده از طرف سیستم ضدوزنه برابر با گشتاور وزن دست شود و کاملا آن را خنثی کند. در این ربات ها محل های قرارگیری دست به وسیله پرینتر سه بعدی با انحنا هایی ساخته شده است که دست افراد به راحتی در آن قرار گرفته و سطح تماس بیشتری برای کاهش فشار وارده به دست داشته باشد و حس خوبی به شخص استفاده کننده بدهد.
ویژگی منحصر به فرد این بازوی رباتیک نسبت به سایر مدل های آن توانایی تطابق خودکار با وزنهای متغیر میباشد. این بدین معناست که این دستگاه می تواند برای افراد متفاوت مورد استفاده قرار گیرد و پس از اتصال به دست به طور خودکار با وزن دست شخص و هر آن چیزی که شخص در دست گرفته است منطبق گردد. این قابلیت استفاده از این بازوی رباتیک را برای افراد معمولی که تخصصی برای تنظیم دستی ربات ندارند آسان می سازد.
این ربات در سه نمونه یک درجه آزادی، دو درجه آزادی و سه درجه آزادی طراحی و ساخته شده است. در نمونه ی یک درجه آزادی دست می تواند حول محور آرنج به صورت عمودی دوران کند. در نمونه ی دو درجه آزادی امکان دوران دست حول محور عمودی و افقی گذرنده از آرنج وجود دارد. در نمونه ی سه درجه آزادی امکان دوران عمودی حول محور آرنج و دوران عمودی و افقی حول محور شانه وجود دارد. در ضمن در نمونه سه درجه آزادی دو نمایشگر جهت نمایش نیروی وارده از طرف دستگاه به هر بخش از دست و چهار دکمه برای افزایش و کاهش نیروی وارده به هر بخش از دست به دستگاه اضافه شده است.
توضیحات
لورم ایپسوم متن ساختگی با تولید سادگی نامفهوم از صنعت چاپ، و با استفاده از طراحان گرافیک است، چاپگرها و متون بلکه روزنامه و مجله در ستون و سطرآنچنان که لازم است، و برای شرایط فعلی تکنولوژی مورد نیاز، و کاربردهای متنوع با هدف بهبود ابزارهای کاربردی می باشد، کتابهای زیادی در شصت و سه درصد گذشته حال و آینده، شناخت فراوان جامعه و متخصصان را می طلبد، تا با نرم افزارها شناخت بیشتری را برای طراحان رایانه ای علی الخصوص طراحان خلاقی، و فرهنگ پیشرو در زبان فارسی ایجاد کرد، در این صورت می توان امید داشت که تمام و دشواری موجود در ارائه راهکارها، و شرایط سخت تایپ به پایان رسد و زمان مورد نیاز شامل حروفچینی دستاوردهای اصلی، و جوابگوی سوالات پیوسته اهل دنیای موجود طراحی اساسا مورد استفاده قرار گیرد.
پژوهشگران
مهدی آتشی گلستان
کلمات کلیدی
بازوی رباتیک، ربات توانبخشی، وزنهای متغیر