سال ساخت: 2008
اسم ربات: NAO
سازندگان: SoftBank Robotics (قبلا Aldebaran Robotics)
کاربرد ربات: مصارف پژوهشی
توضیحات
رباتهای انساننما شاخهای از رباتهای پایه متحرک میباشند که به دلیل تشابه به انسان، محبوبیت بیشتری را نسبت به سایر رباتها از آن خود نمودهاند. هر روزه مهندسان در تلاشند تا این رباتها چه از لحاظ ظاهر و چه از جنبهی قابلیتهای رفتاری تشابه بیشتری به انسان داشته باشند. امروزه رباتهای انساننمای پیشرفته، بسیاری از کارهای انسان همانند راه رفتن، دویدن، حفظ تعادل در برابر اغتشاشات خارجی، جابجایی اشیاء و غیره را میتوانند انجام دهند. همچنین این رباتها میتوانند به واسطهی دستاوردهای هوش مصنوعی از قبیل پردازش تصویر، پردازش الگو، تشخیص صوت، قابلیت صحبت کردن و سایر مهارتهای ارتباطی، تعامل خوبی را با محیط پیرامون و انسانها برقرار کنند.
توضیحات
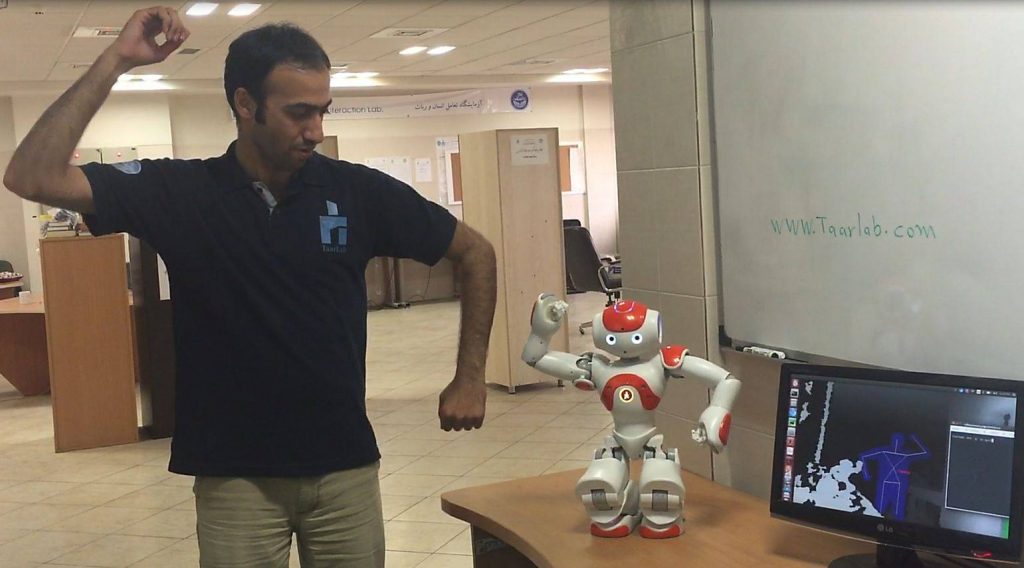
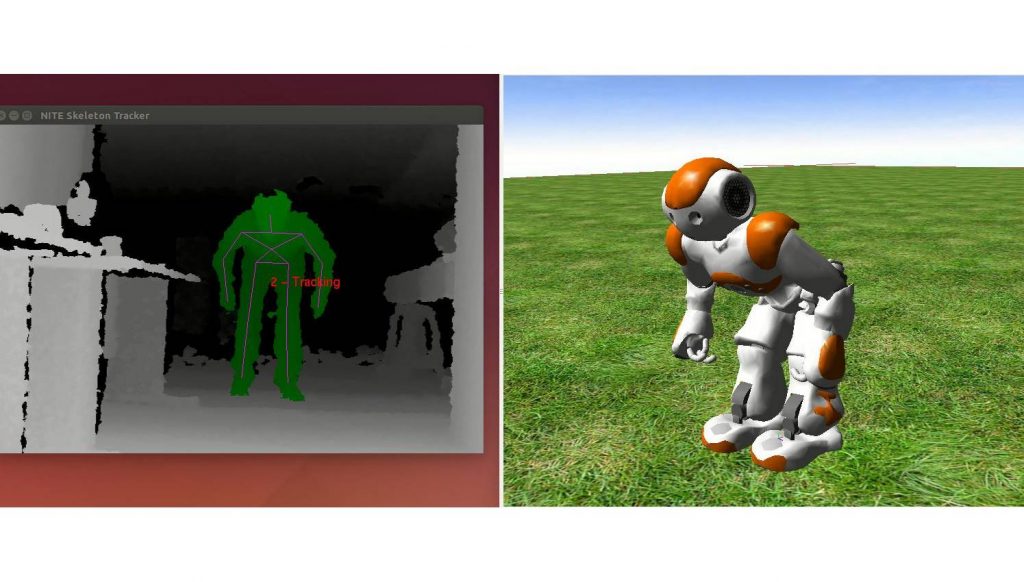
در این پروژه یکی از پژوهشهای موسوم به تعامل انسان و ربات با موضوع تقلید حرکات انسان توسط ربات انساننمای نائو مورد مطالعه قرار گرفته است. در این تحقیق، ابتدا حرکات انسان به واسطه دوربین دید سه بعدی کینکت که توسط بسته نرم افزاری سیستم عامل ربات (راس) راهاندازی شده است، دریافت میگردد. با توجه به اختلاف ابعادی میان انسان و ربات، حرکات دریافتی به ابعاد ربات نگاشت میشود. بعد از اعمال نگاشت، حل سینماتیک مستقیم و معکوس ربات ارائه میگردد. بدین منظور، فرم دیستال در حل سینماتیک مستقیم مورد استفاده قرار گرفته و بر مبنای آن راه حل تحلیلی برای حل سینماتیک معکوس ارائه شده است. راه حل تحلیلی ارائه شده به عنوان یکی از نوآوریهای اصلی مقاله، دلیل اصلی حرکات روان ربات در تقلید حرکات انسان میباشد. به منظور حفظ تعادل ربات در زمان تقلید، استراتژی قوزک پا بر مبنای مدل پاندول معکوس خطی و معیار تصویر زمینی مرکز جرم ارائه شده است. پاندول معکوس مدل شده در دو فاز جفت تکیه گاهی و تک تکیه گاهی توسط کنترل کننده تناسبی-انتگرالی-مشتقی کنترل میشود. نتایج پیاده سازی عملی و شبیه سازی روش ارائه شده در پروژه با در نظر گرفتن محدودیتهای ناشی از سامانه دریافت حرکات انسان، نمایانگر تقلید حرکات تمام-بدن انسان با دقت، نرمی و سرعت بالا در ربات میباشد.
پژوهشگران
پوریا شاهوردی
کلمات کلیدی
ربات انسان نما